





























685
Appendix 4
Parameters (functions) and
instruction codes under different
control methods
Instruction codes are used to read and write parameters in accordance with the Mitsubishi inverter protocol of RS-485 communication.
(For RS-485 communication, refer to
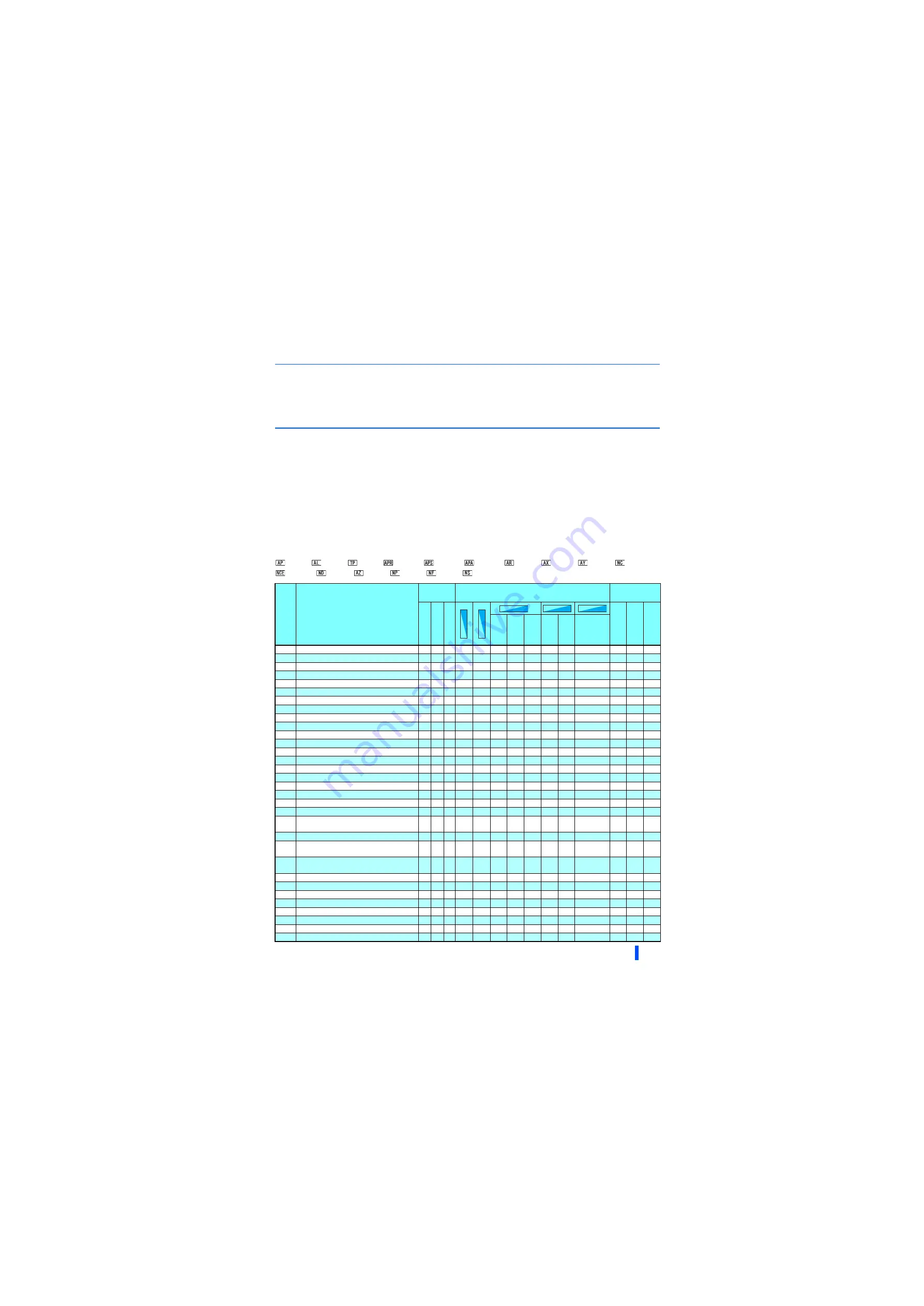
Function availability under each control method is shown as below:
: Available
: Not available
∆
: Available with some restrictions
If function availability differs between using induction motors with an encoder and using PM motors with an encoder, the function availability
using PM motors with an encoder is described in parentheses. Also, a PM motor with an encoder is not available under the torque control.
For "parameter copy", "parameter clear", and "all parameter clear", "
" indicates the function is available, and "
" indicates the function is not
available.
These parameters are not cleared by the parameter clear (all parameter clear) command, which are sent through RS-485 communication. (For
RS-485 communication, refer to
.)
When a communication option is installed, parameter clear (lock release) during password lock (
Pr.297
≠
"9999") can be performed only from
the communication option.
Reading and writing via the PU connector are available.
Symbols in the table indicate parameters that operate when the options are connected.
FR-A8AP, FR-A8AL, FR-A8TP, FR-A8APR, FR-A8APS, FR-A8APA, FR-A8AR, FR-A8AX, FR-A8AY,
FR-A8NC,
FR-A8NCE, FR-A8ND, FR-A8AZ, FR-A8NP, FR-A8NF, FR-A8NS
Pr.
Name
Instruction
code
Control method
Parameter
R
ead
Wr
it
e
Extended
Co
py
Clea
r
All cl
ear
Sp
eed
co
ntro
l
To
rq
u
e
co
ntro
l
Position
co
ntro
l
Sp
eed
co
ntr
o
l
To
rq
u
e
co
ntr
o
l
Sp
eed
co
ntr
o
l
0
Torque boost
00 80 0
1
Maximum frequency
01 81 0
2
Minimum frequency
02 82 0
3
Base frequency
03 83 0
4
Multi-speed setting (high speed)
04 84 0
∆
5
Multi-speed setting (middle speed)
05 85 0
∆
6
Multi-speed setting (low speed)
06 86 0
∆
7
Acceleration time
07 87 0
∆
8
Deceleration time
08 88 0
∆
9
Electronic thermal O/L relay
09 89 0
10
DC injection brake operation frequency
0A 8A 0
11
DC injection brake operation time
0B 8B 0
12
DC injection brake operation voltage
0C 8C 0
13
Starting frequency
0D 8D 0
14
Load pattern selection
0E 8E 0
15
Jog frequency
0F 8F 0
16
Jog acceleration/deceleration time
10 90 0
17
MRS input selection
11 91 0
18
High speed maximum frequency
12 92 0
19
Base frequency voltage
13 93 0
20
Acceleration/deceleration reference
frequency
14 94 0
∆
21
Acceleration/deceleration time increments
15 95 0
∆
22
Stall prevention operation level
(Torque limit level)
16 96 0
23
Stall prevention operation level
compensation factor at double speed
17 97 0
24
Multi-speed setting (speed 4)
18 98 0
∆
25
Multi-speed setting (speed 5)
19 99 0
∆
26
Multi-speed setting (speed 6)
1A 9A 0
∆
27
Multi-speed setting (speed 7)
1B 9B 0
∆
28
Multi-speed input compensation selection
1C 9C 0
29
Acceleration/deceleration pattern selection 1D 9D 0
30
Regenerative function selection
1E 9E 0
31
Frequency jump 1A
1F 9F 0
V/FV/FV/F
Magnetic fluxMagnetic fluxMagnetic flux
Vector
Vector
Vector
Sensorless
Sensorless
Sensorless
PM
PM
PM
Содержание 800 Series
Страница 11: ...MEMO 10 ...
Страница 17: ...MEMO 16 ...
Страница 95: ...MEMO 94 ...
Страница 671: ...MEMO 670 ...
Страница 681: ...MEMO 680 ...