





























11-169
11-169
11.9.5. Items written when saving in robot
When saving a robot program in a robot controller, write items can be set by categorizing them into instructions,
position variables and program external position variables.
This save item default values for when you have read a robot controller program are the same as the "Read Items"
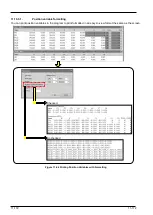
when you read the program. When you have created a new program or opened a program on the computer, the
display becomes as in
Figure 11-64 Save Item
s
We will explain the operations for saving to a robot when only command lines or only position variables are specified,
using the following example for illustration.
Example: When there are programs in program editing on the computer or in
the robot controller
(1) When only command line written
(2) When writing position variable only
<<Program in the robot controller >>
10 Mov P1
20 Mov P2
30 Mov P3
40 End
P1= (400.000, 0.000, 100.000,-90.000) (4, 0)
P2= ( 0.000, 400.000, 150.000, 0.000) (4, 0)
P3= (-351.700, -49.370, 22.000,-95.170) (0, 0)
P4= (276.500,-599.070, 264.970, 29.170) (0, 0)
P5=( 535.790, 295.020, 102.000…148.420)(0,0)
<<Program in the robot controller>>
10 Mov P1
20 Mov P2
30 Mov P3
40 End
P1= (400.000, 0.000, 100.000, 90.000) (4, 0)
P2= ( 0.000, 400.000, 150.000, 0.000) (4, 0)
P3= (-351.704, -49.369, 22.000,-95.168) (0, 0)
P4=( 276.499,-599.066, 264.966, , , 29.170)(0,0)
<< Program on computer >>
100 Mov P1
200 Mov P2
300 Mov P5 ‘<- Change
400 End
P1= (400.000, 0.000, 100.000,-90.000) (4, 0)
P2= ( 0.000, 400.000, 150.000, 0.000) (4, 0)
P3= (-351.704, -49.369, 22.000,-95.168) (0, 0)
P5= (535.786, 295.021, 102.000, 148.420) (0, 0)
<<Program in the robot controller>>
100 Mov P1
200 Mov P2
300 Mov P5
400 End
P1= (400.000, 0.000, 100.000, 90.000) (4, 0)
P2= ( 0.000, 400.000, 150.000, 0.000) (4, 0)
P3= (-351.700, -49.370, 22.000,-95.170) (0, 0)
P4= (276.500,-599.070, 264.970, 29.170) (0, 0)
Changing only the command line
The position variables are not
changed.
The command line is not changed.
The position variables on the computer are
overwritten. However, position variables
that are in the robot controller, not on the
computer, are left as is. (Reference)
Содержание 3F-14C-WINE
Страница 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Страница 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Страница 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Страница 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Страница 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Страница 624: ...24 624 24 624 Figure 24 4 Document output example ...