





























User Manual
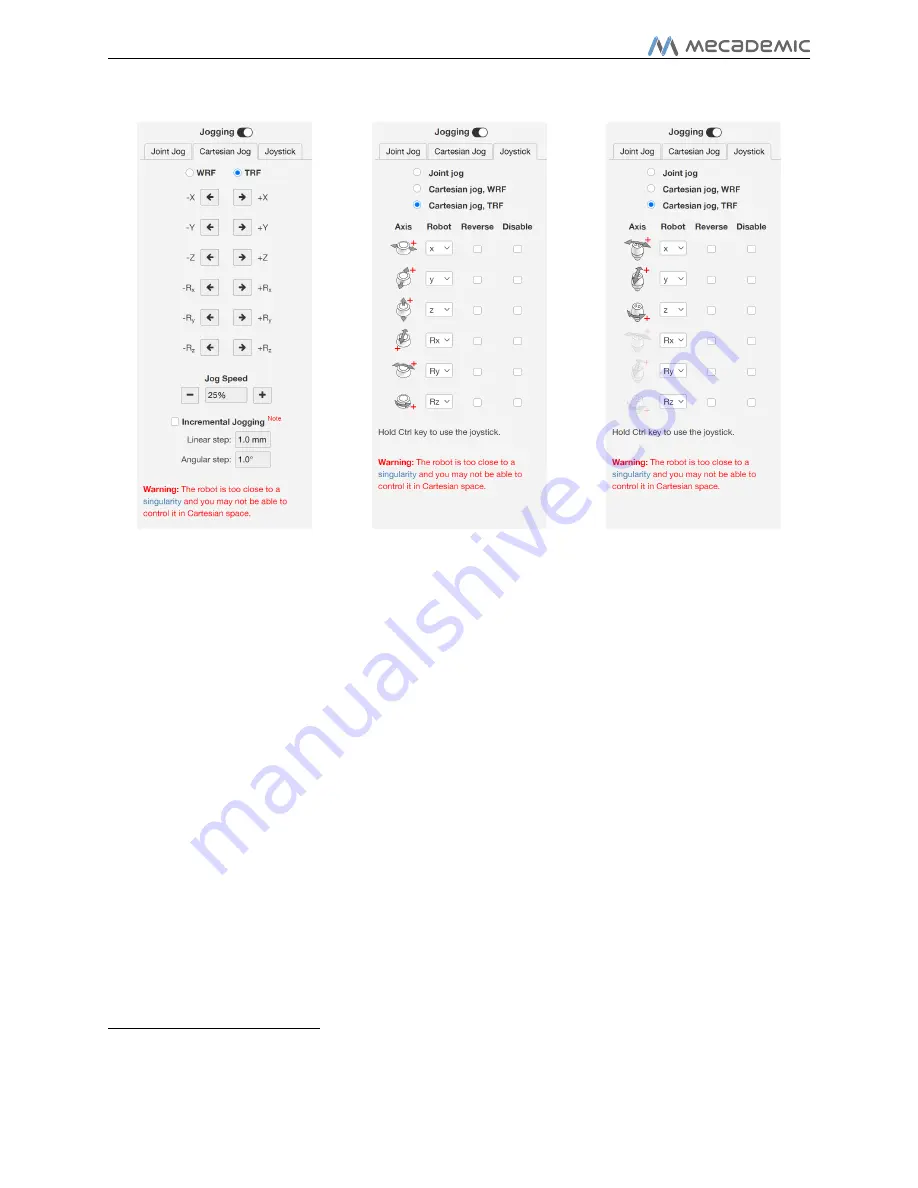
(a) Cartesian jog tab
(b) Joystick tab (in case of
3DConnexion's SpaceMouse)
(c) Joystick tab (in case of
Mecademic's MJ3 joystick)
Figure 11: The Cartesian jog and joystick tabs
7.7.2 The Cartesian Jog tab
In the Cartesian Jog tab (Fig. 11a), you can move the robot along (by pressing the X, Y, or Z
arrow buttons) or about (by pressing the Rx, Ry, or Rz arrow buttons) the axes of the TRF
(if the TRF radio button is selected) or along or about the axes of a reference frame having
the same orientation as the WRF but with origin at the TCP (if the WRF radio button is
selected).
As in the Joint Jog tab, you can select the jog speed and choose to jog both continu-
ously and incrementally. The jog speed in incremental jogging is again constant, and set to
100 mm/s (for linear jogging) or 100
◦
/s
(for angular jogging). For the incremental jogging,
you can choose both a linear step (from 0.1 mm to 5.0 mm, in increments of 0.1 mm) and
an angular step (from
0
.
1
◦
to
5
.
0
◦
, in increments of
0
.
1
◦
). However, in Cartesian incremental
jogging, we cannot guarantee that the actual step will be exactly as specied. If the robot
is close to a singularity or to a joint limit, the actual step will be smaller or even zero and
there won't be any warning.
Page 18 of 38
Copyright c
2020 by Mecademic Inc.





























































