





























Motherboard Design Guide
Requirements for Components of Third-party Suppliers
maxon motor control
4-74
Document ID: rel8003
EPOS4 Positioning Controller
Edition: May 2018
EPOS4 Module/Compact 50/5 Hardware Reference
© 2018 maxon motor. Subject to change without prior notice.
4.1.4
Motor Cables and Motor Chokes
The Module is not equipped with internal motor chokes.
The majority of motors and applications do not require additional chokes. However, in case of high sup-
ply voltage with very low terminal inductance, the ripple of the motor current can reach an unacceptably
high value. This causes the motor to heat up unnecessarily and causes instable control behavior. The
minimum terminal inductance required per phase can be calculated using the following formula:
If the result of the calculation is negative, no additional chokes are necessary. Nevertheless, the use of
chokes in combination with additional filter components can be useful to reduce the emission of electro-
magnetic interference.
An additional choke must feature electromagnetic shielding, an adequate saturation current, minimal
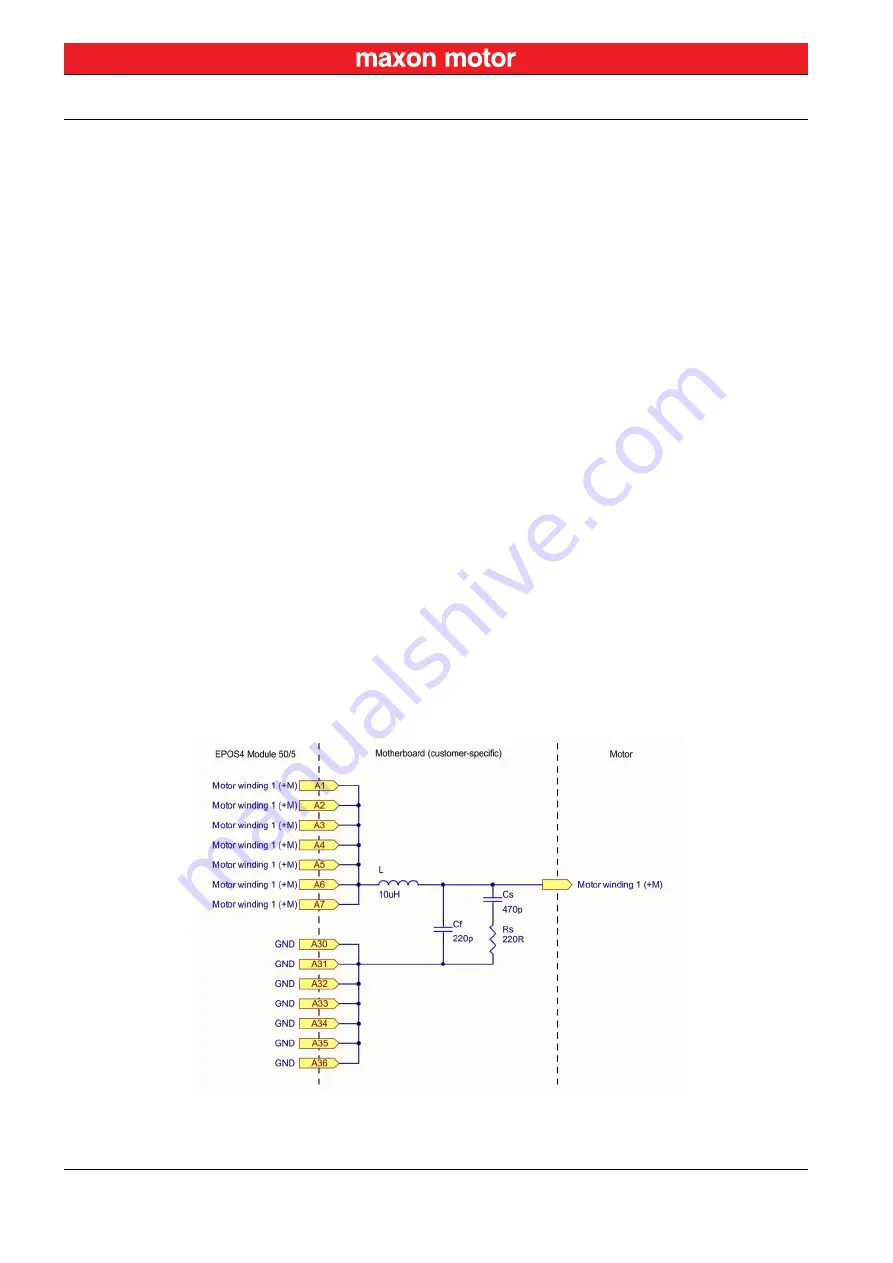
losses, and a nominal current greater than the continuous current of the motor. The below wiring exam-
ple refers to an additional inductance of 2.2 μH or 10 μH. If a different additional inductance is required,
also the filter components must be adapted accordingly. Should you need further help with the filter
design, contact maxon Support at
http://support.maxonmotor.com.
Example 1
Additional external inductance per phase
Operating vV
CC
Switching frequency of the power stage = 50’000 Hz
Nominal current of the motor (
line 6 in the maxon catalog)
Terminal inductance of the motor (
line 11 in the maxon catalog)
L
Phase
1
2
---
V
CC
6
f
PWM
I
N
⋅
⋅
-----------------------------
0.3
L
Motor
⋅
(
)
–
⋅
≥
L
Phase
H
[ ]
V
CC
V
[ ]
f
PWM
Hz
[
]
I
N
A
[ ]
L
Motor
H
[ ]







































































