
























11
c) Power Supply
In assembling the Robobug you will need the battery for the power supply, in order to be able to move the leg servos in the middle position, to align the legs and
later to install the firmware, which is responsible for running the robot in the next work steps. For all this work, the Robobug needs a power supply.
The right power supply is crucial for the safe and trouble-free operation of the Robobug. The Robobug is designed for a NiMH battery with 5 cells and a capacity
between 3500 - 5000 mAh.
We recommend using the optionally available rechargeable battery. This can be used directly with the Robobug without soldering.
Prepare your own battery
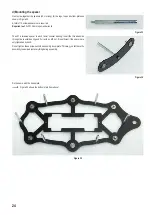
The "Hexapod Robobug" complete set comes with a type XT30 battery plug. This is
soldered to the battery selected by you. The cable length between battery and plug
must not exceed 20 cm! For the connection cable, we recommend using a highly flex-
ible silicone cable with a cross-section of between 2 and 2.5 mm².
Pay attention to the polarity (plus/+ and minus/-), and that no short circuit is caused
by soldering.
In the event of a short-circuit, rechargeable batteries can emit a lot of current,
which can lead to burns and fire damage as well as to dangerous injuries. An
explosion of the battery is also possible!
The ready-made battery is provided with a battery shrink tube. This way the battery
looks clean at the end of the soldering work and indicates that there is no danger of a
short circuit.
In figure 7 you can see how the battery is plugged into the Robobug. The plug is
protected against reverse polarity and cannot therefore be plugged in the wrong way.
d) Installation of the software and firmware
The software packages, firmware and tools required for the "Hexapod Robobug" are available online as a download package. This package is updated and
extended regularly. Please check occasionally whether a new version or useful extensions are available.
Open your web browser and navigate either via our shop website www.conrad.com to the product page of the "Hexapod Robobug" complete set, or visit our
download centre www.conrad.com/downlods. directly.
Here you can download the package "001664151-up-01-en-DOWNLOAD_BUNDLE_Vx_x" (x_x is the version of the package). The highest version number
corresponds to the latest version! Unpack the downloaded ZIP file on your hard disk.
Here is a short explanation of the included folders:
"Arduino"
Here is a text file with the download link for the software Arduino™ IDE included.
This is needed, for example, to install the firmware without an updater.
"Datasheets"
Data sheets and sketches
"Driver"
Driver for the FTDI USB chip
"Library demos" Contains the Arduino library, demo's and the Locomotion firmware as a ZIP file. Will be installed in the Arduino IDE.
"Schematic"
Schematic of the Hexapod Robot Board as PDF file
"Terminal"
Calibration software for setting the Hexapod
Figure 6
Figure 7
Содержание 1664151
Страница 1: ...Operating Instructions Hexapod Robobug Complete Set Item no 1664151...
Страница 23: ...23 The femur servo mount must be mounted a total of 6 times Figure 31 Figure 32...
Страница 26: ...26 Figure 37...
Страница 36: ...36 Figure 58 Figure 59...
Страница 37: ...37 Figure 60 Illustration_61 Figure 61...
Страница 38: ...38 Figure 62...
Страница 66: ...66...
Страница 67: ...67...







































































