





























7.19 Safe Operating Stop (SOS)
The SOS function is implemented according to EN 61800-5-2
The function SOS holds the motor with zero speed on its position. The position is controlled and safely monitored
No mechanical components are necessary to keep the motor against an eventual counterforce in position. Because of
the short response time and because the position control is active all the time the down- and set-up-time is reduced.
The activation can be done via safe digital IO’s or a safe field bus (configurable).
One instance of SOS is implemented.
The SOS can only be realized with safe position encoders.
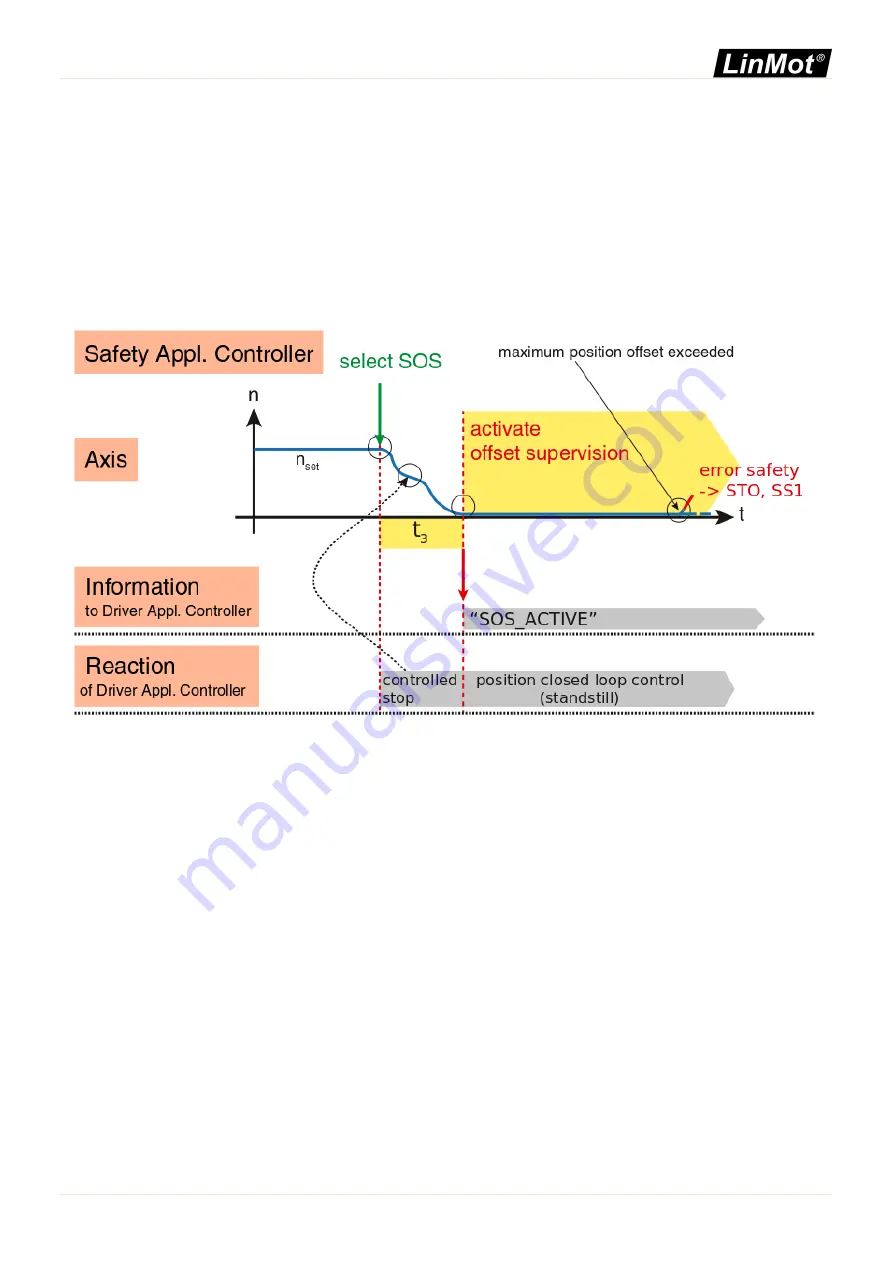
Figure 28: SOS Timing
In the "Safe Operation Stop" state the speed of the device is zero and the drive holds the motor at this position in a
limited range. With the activation of SOS, a timer is started. After the time t3 the SOS becomes active and the offset
supervision is activated.
If configured, the safety module shall monitor the position of the motor to be within the offset supervision limits.
If configured, the safety module shall keep the SOS state active, until the restart is acknowledged via the safe fieldbus or
the acknowledge input.
2S Drive Systems / 0185-1174_E_1V1_SM_C1251-2S / NTI AG
0185-1174_E_1V1_SM_C1251-2S / 2021-11-26 16:43 (Rev. 12500)
Page 118 of 150







































































