





























9.6.2
General mode of operation
If an event occurs at the configured touch probe source, a time stamp is detected in the servo
inverter.
The detected time stamp is related to the system time and can thus be divided into two parts:
One part is the control cycle in which the of the event. The other part is the time difference
starting from the detected control cycle to the real detection of the event
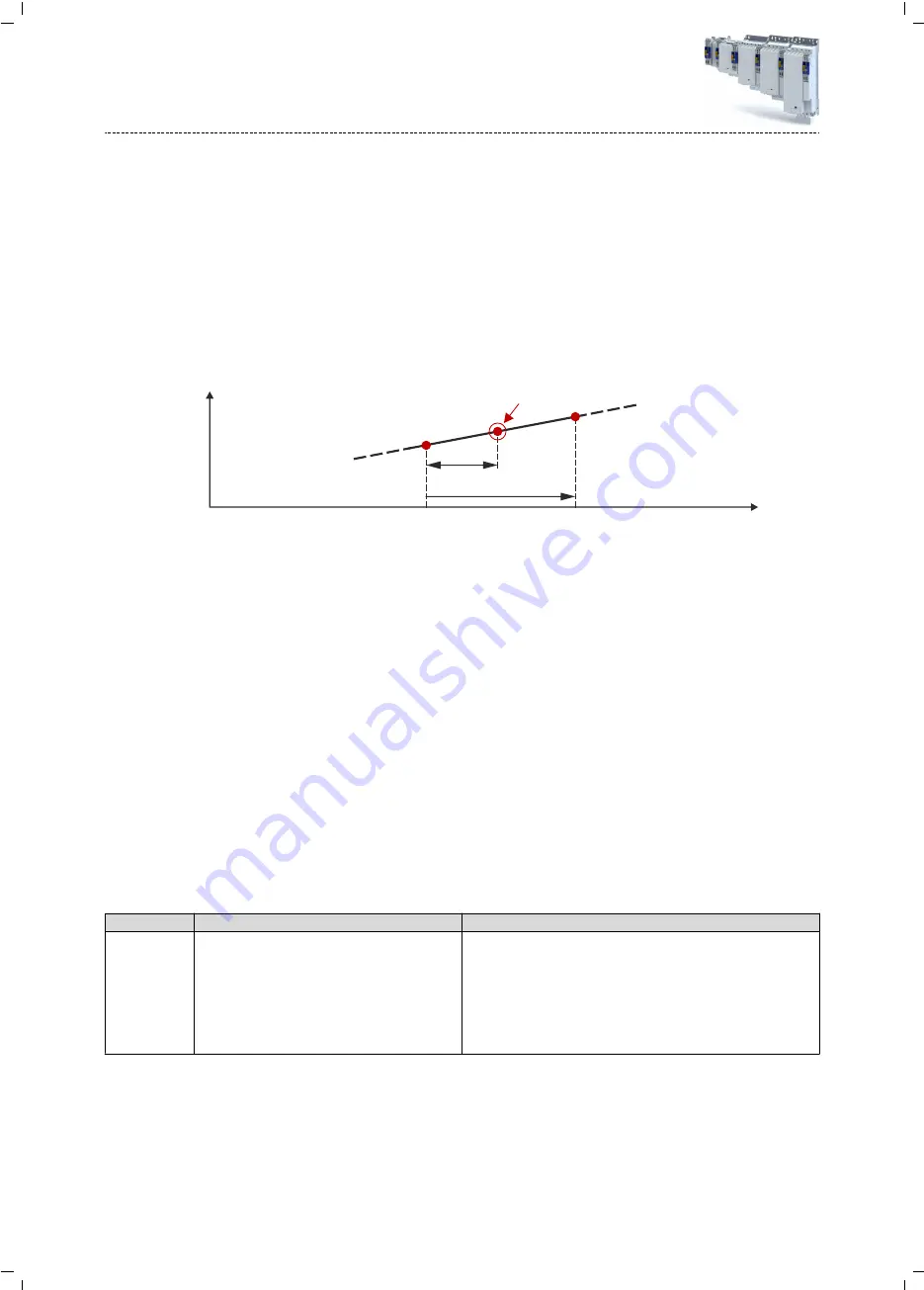
Thanks to a history buffer, the servo inverter knows the last n position values. Thus, the actual
position is known at the start and at the end of the control cycle in which the event has occur-
red. A linear interpolation takes place between these two position grid points. The result is
the exact position at the motor shaft at the time the event is triggered, see the schematic dia-
gram:
Event received
250 µs
Position
t
t
1
p
n-1
p
n
t
1
: Time difference starting from the detected control cycle to the real detection of the event
P
n-1
: Actual position grid point 1
P
n
: Actual position grid point 2
The position grid points are detected in the servo inverter in a grid of 250 µs. After a touch
probe has been triggered, the input is deactivated for up to 250 µs to avoid bouncing. Thus,
the maximum frequency for touch probe triggering is 4 kHz.
If in contrast to the uniform movement given in the figure, an accelerated movement is taken
as a basis, the 250 µs grid also allows for a very good linear position reconstruction because
the speed change at the motor shaft only has a marginal impact in 250 µs.
9.6.3
Filtering of the touch probe signal
For the touch probe inputs, a common filter time (debounce time) can be parameterised to
debounce the TP signals so that there is no response to external interfering signals.
•
The signal status of the debouncing filter is detected at the TP input and a new value is
added to the filter.
•
A separate setting for a touch probe is not possible. Thus, the filter time is set for all touch
probe inputs.
Parameter
Address
Name / setting range / [default setting]
Info
0x2500
Touch probe filter time
0 ... [0] ... 1984 us
The set filter time is automatically taken into account in the touch probe
calculation.
The setting "0" deactivates the filter.
Note!
Values can be set directly. When entering a filter time between
0 ... 1984 µs, the value is automatically rounded down internally to the
next value that can be set and is shown in the case of read requests.
Configure position control
Position detection with touch probe (TP)
Filtering of the touch probe signal
166
Содержание i950 Series
Страница 1: ...Inverters i950 servo inverters Commissioning EN ...
Страница 2: ......
Страница 312: ...15 Configure engineering port The given path leads you to the engineering port Configure engineering port 312 ...
Страница 397: ...19 Safety functions Supported safety functions for Basic Safety STO 4Safe Torque Off STO 398 Safety functions 397 ...
Страница 497: ......
Страница 498: ......
Страница 499: ......







































































