





























25
|
www.lakeshore.com
By adding the integral to proportional contributions, the error history will push the
output towards a stable value. When the error is at zero, controlling at the setpoint,
the output is held constant by the integral contribution. The integral setting (I) is
more predictable than the proportional setting. It is related to the dominant time
constant of the magnet. The integral term is set in seconds and a smaller setting cre-
ates a more active integrator.
3.5.2.3.4 Tuning Integral
When the proportional setting is chosen and the integral is turned off, the teslameter
will control the field to some value below the setpoint. Setting the integral allows the
control algorithm to gradually eliminate the difference in field by integrating the
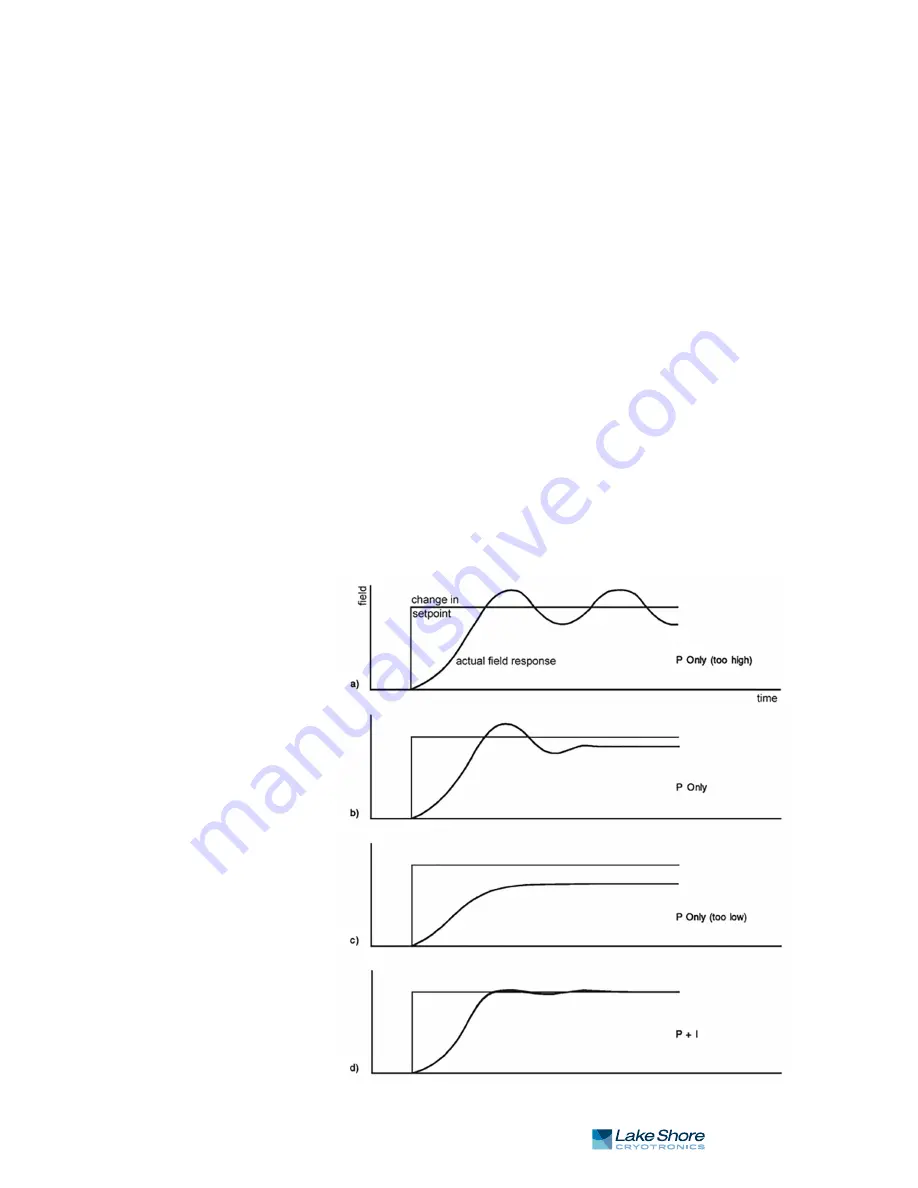
error over time. See FIGURE 3-17(d). An integral setting that is too low causes the field
to take too long to reach the setpoint. An integral setting that is too high can create
overshoot, which cannot be tolerated in many magnetic systems. An integral setting
that is very high will eventually cause the field to oscillate.
Begin this part of the tuning process using the proportional setting found above, and
enter an I setting of 100. If the field begins to oscillate, increase the I setting by a fac-
tor of two. Remember the integral term is set in seconds and a smaller setting creates
a more active integrator. If the field is stable but never reaches the setpoint, the inte-
gral setting is too high and should be reduced by one half.
To verify the integral setting, make a few small (100 mT) changes in setpoint and
watch the field react. Trial and error can help improve the integral setting by optimiz-
ing for experimental needs. Faster integrals, for example, get to the setpoint more
quickly at the expense of greater overshoot.
FIGURE 3-17
Examples of PI control







































































