






















Description of the drive module
Positioning module UVE8112, IMD10
Description of the drive module
Settings and status display
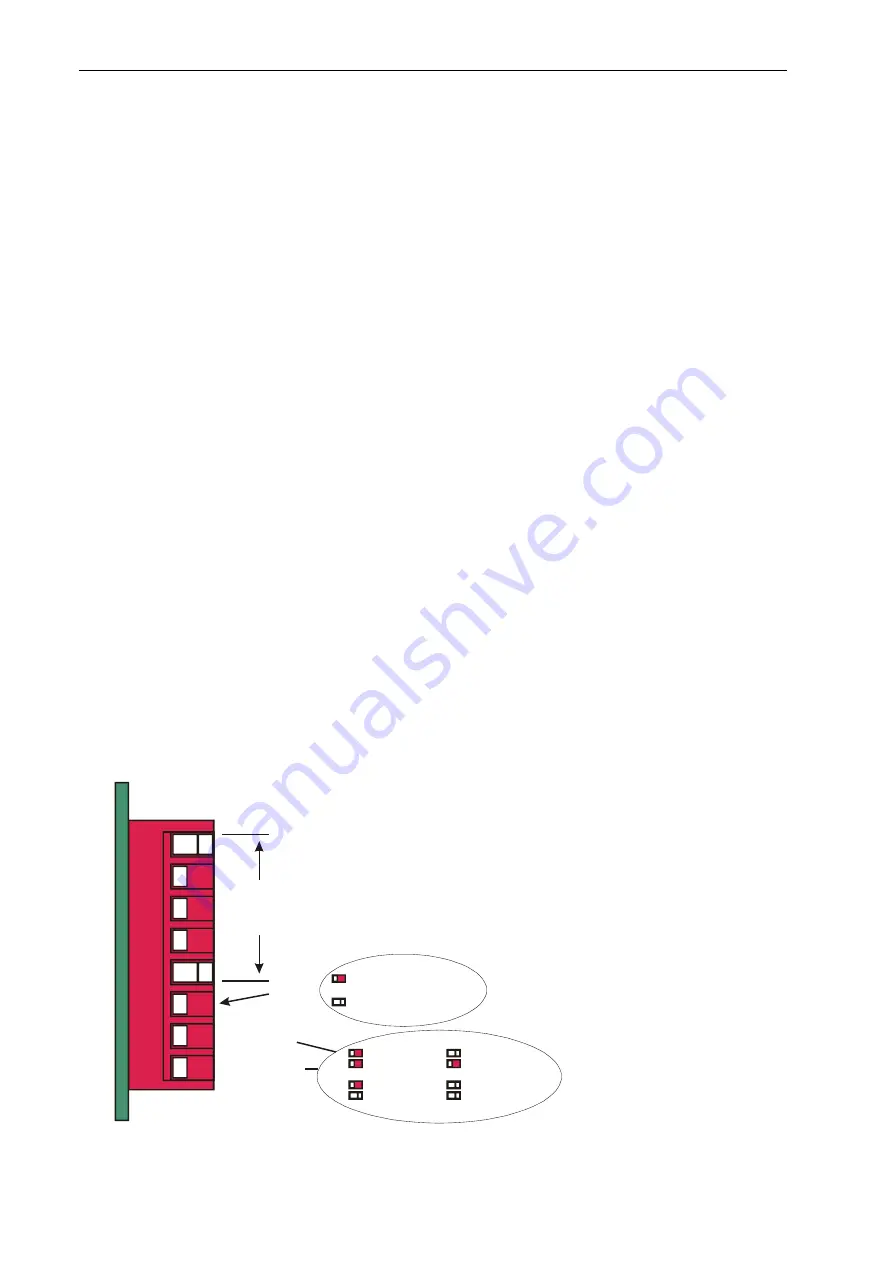
On the front (UVE8112) or on the side (IMD10) of the module, a DIP switch is provided for settings
concerning the node address, the baud rate and the mode of communication / operation.
Furthermore, LEDs show the current mode of operation.
DIP switch
The DIP switch is only queried, when the module is switched on or after it was reset. During the
operation, a commutation of the switch does not have any effects whatsoever.
•
The switches S1 to S5 are used to set up the CanOpen node address. Possible node addresses
are:
1
to
30
.
!
If the
Node number 0
is set, Address 1 is used automatically, since 0 is reserved for the
CanOpen master.
!
The setting of
Node number 31
is provided for the operation of a single-axis control with a
special SPS. The node address is set automatically to Address 6.
•
The switch S6 defines the baud rate for the CAN connection
and
the RS232 interface. In High
Speed Submode the CAN baud rate of the module is determined by the object Can Baud Rate
(2001) (see object directory, manufacturer specific objects, object Can Baud Rate). Under
„Setting->Object directory->Manufacturer specific objects->2001 Can Baud Rate->03 New High
Speed Submode“ of DCSetup you can change the CAN baud rate of the moduel (double click on
the object). After switch off and switch on of the modul the new baud rate is used. When you
change the baud rate of the module do not forget to change also the baud rate in DCSetup and
CANSet. For the interpolation with gantry axis at least a baud rate of 250 kBit/s is needed, for
normal interpolation you need at least 125 kBit/s. Default is 1 Mbit/s.
•
The two switches S7 and S8 determine which communication channel has priority (CAN, RS232
or analogue input). In case of an analogue input, one of two set modes of operation is chosen
(current or velocity control).
See "Data transfer" on Page 24.
1
2
3
4
5
6
7
8
Node address
E.g. 17
Baud rate
0
1
RS-232:
57.6 kBd
CAN: Highspeed Submode
RS-232:
19.2 kBd
CAN: 20
kBit/s
Analogue input
RS-232 / CAN
CAN
RS-232
Analogue input
(current control)
Analogue input
(velocity control)
8
Содержание IMD1
Страница 1: ...DC servo positioning module with CanOpen interface UVE8112 IMD10 www isel com ...
Страница 66: ...DcSetup programme Positioning module UVE8112 IMD10 66 ...
Страница 113: ...Positioning module UVE8112 IMD10 Appendix 113 Appendix UVE8112 package dimensions ...
Страница 114: ...Appendix Positioning module UVE8112 IMD10 114 IMD10 package dimensions ...







































































