



MANUAL
• Subject to alteration! Stand: October 2021
ipf electronic gmbh
│
Rosmarter Allee 14
•
58762 Altena
• Germany
│
Tel +49 2351 9365-0 • [email protected] •
2
Approved use
The ultrasonic diffuse-reflection sensor are used as part of a higher-level overall system for the contactless detection of
objects.
Function
The ultrasonic diffuse-reflection sensors work on the principle of time-of-flight measurement. The device transmits a pulse
train, which is then reflected by an object. The device detects the reflected wave and measures the time that has elapsed
between the transmission and reception processes. This time is used to determine the distance between the sensor and
the object. If the results correspond to the specified values, the analog output outputs a value proportional to the distance
and the switching output is set accordingly.
Mounting
The sensor may be mounted in any position. Make sure that it is mounted in a vibration-free and vibration-damping manner.
Also protect the device against mechanical loads such as shocks or impacts.
It is imperative that the transducer surface as well as the area of the detection lobe are kept free. Make sure that there are
no interfering objects between the sensor and the target object inside the lobe. Otherwise, it is possible that the interfering
object will cause false switching. Also avoid positioning two or more ultrasonic sensors opposite each other.
Temperature
The speed of sound in air depends on the temperature. Operation outside the specified ambient temperature is not
allowed. A temperature compensation can be switched on via IO-Link.
When temperature compensation is activated, the sensor requires about 15 minutes of warm-up time after a cold start;
only then are the measured values reproducible.
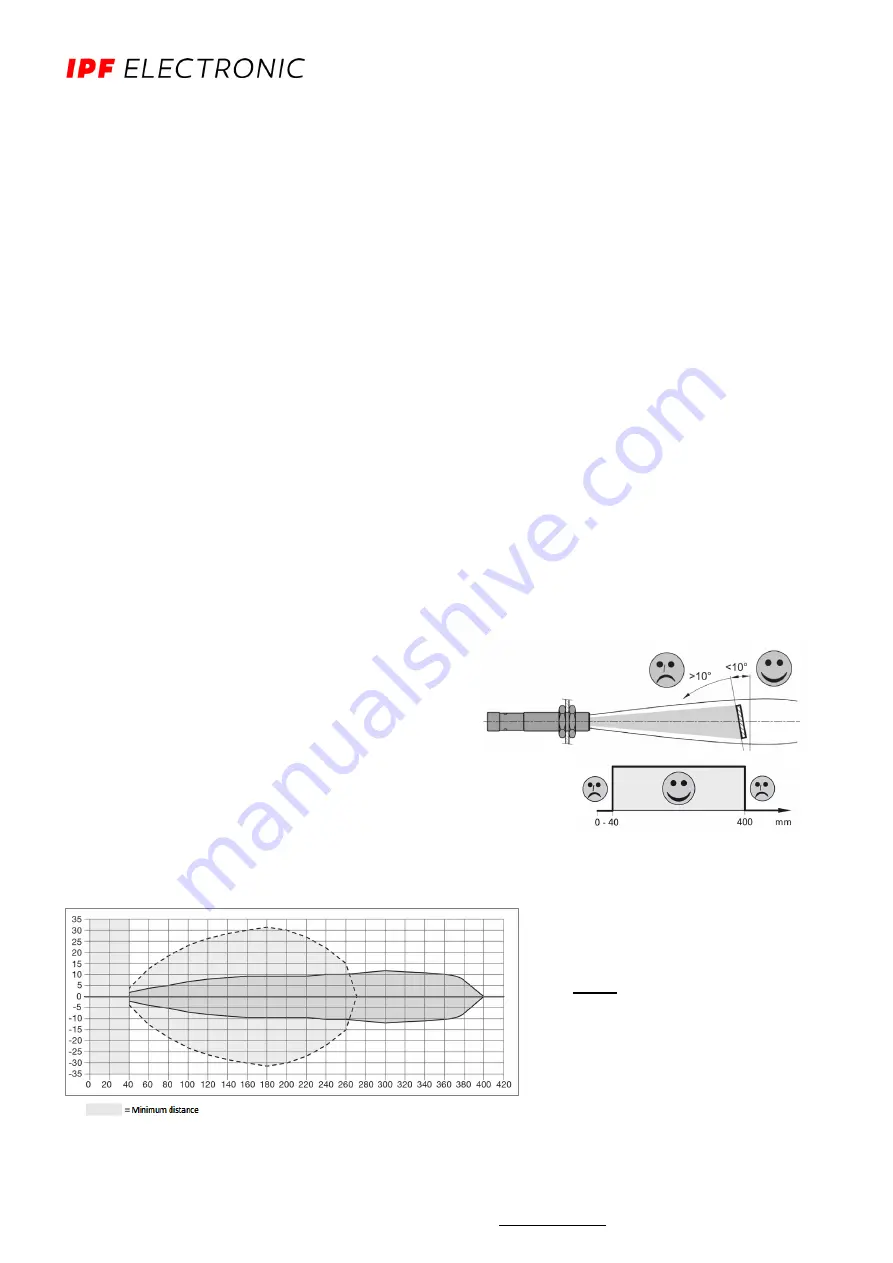
Transmission angle of the object in diffuse mode
Objects with a smooth surface are scanned reliably up to an angle
of inclination of approx. 10°. The maximum permissible angle of
inclination increases for objects with rough or highly structured
(grained) surfaces.
Blind range in touch mode
The range of 0 … 40mm in front of the sensor corresponds
to the ultrasonic
typical blind range.
Distance measurements are not possible in the blind range!
The maximum scanning distance 400 mm.
Detection beams
Plate 200 x 200mm
- - - - - - Round bar Ø 10mm







































































