





















AP29002
Standalone TwinCAN Controller
CAN protocol overview
Application Note
6
V 1.0, 2004-02
2
CAN protocol overview
CAN is an asynchronous serial bus system with one logical bus line. A CAN bus
consists of two or more nodes. The number of nodes on the bus may be changed
dynamically without disturbing the communication of other nodes. This allows easy
connection and disconnection of bus nodes (e.g. node for software upgrade, bus
monitoring…).
The bus logic corresponds to a “wired-AND” mechanism, recessive bits are overwritten
by dominants bits. As long as no bus node is sending a dominant bit, the bus line is in
the recessive state, but a dominant bit from any node generates the dominant Bus
State.
The maximum bus speed is 1Mbaud, which can be achieved with a bus length of up to
40m. At least 30 nodes may be connected without additional equipment.
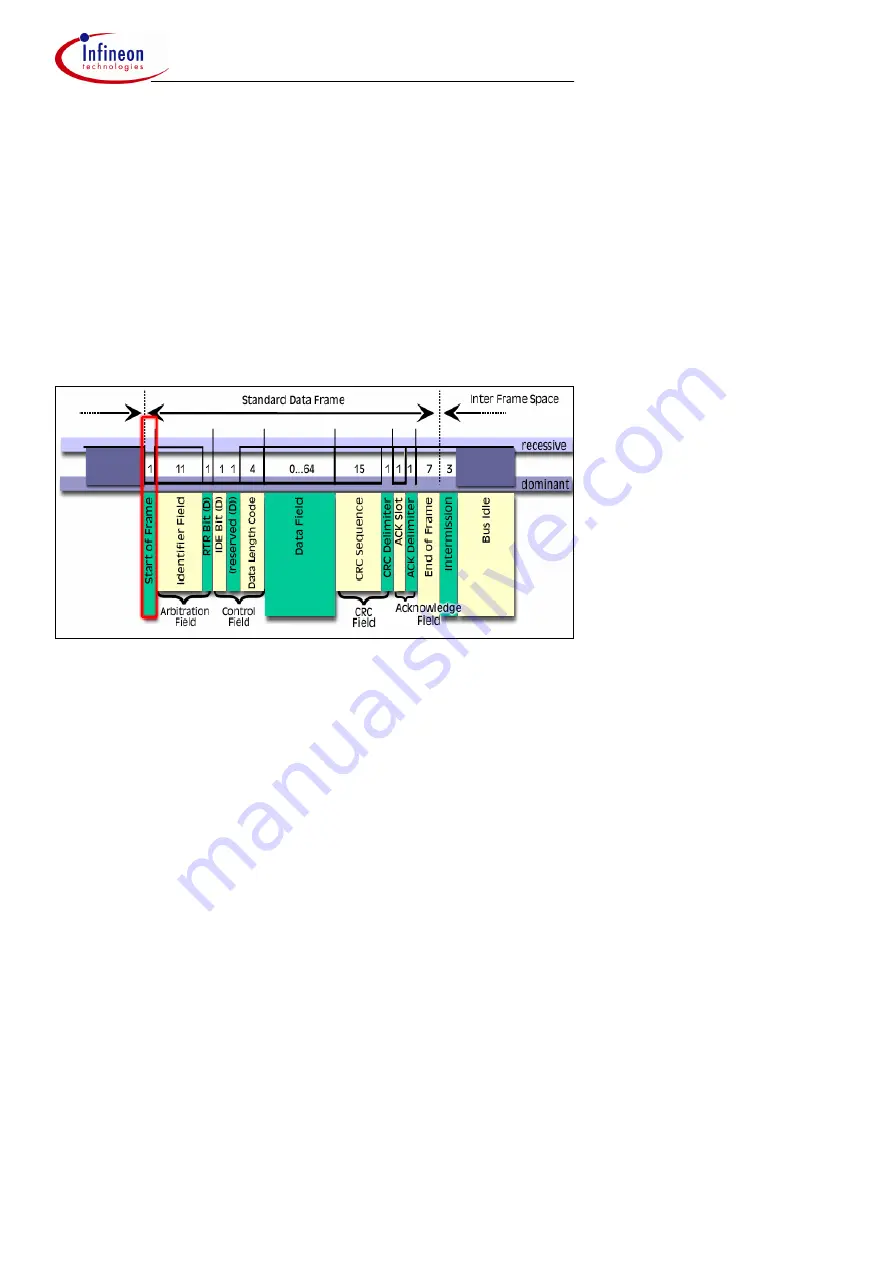
Figure 2
Structure of a Standard data Frame generated by a CAN node





















































