





















CR3145
mobileIoT gateway
12
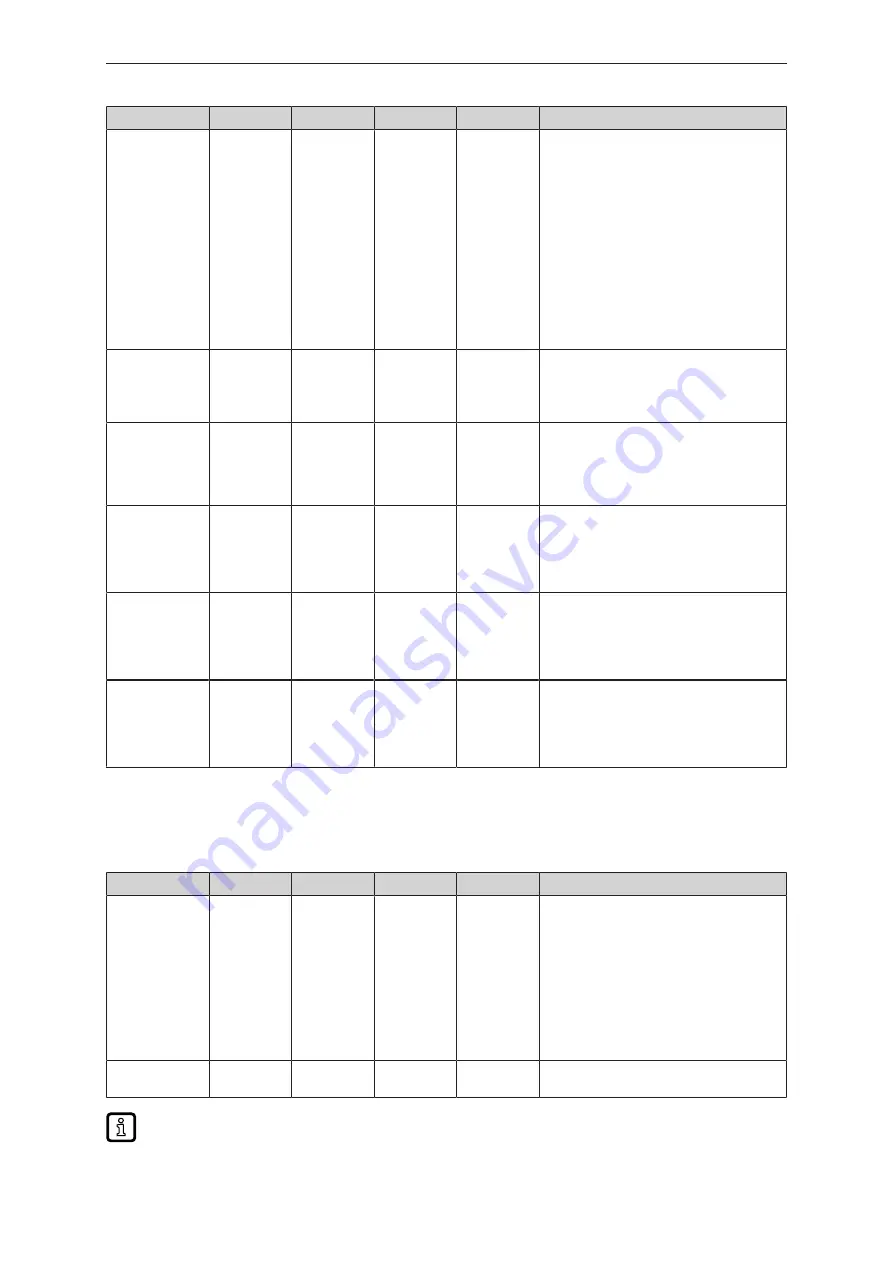
Object
Index
Subindex
Type
Default
Description
Power manage-
ment – time to
sleep
0x3333
0x08
U8
wo
—
Time in seconds until switching to sleep
mode.
The unit only changes to sleep mode if
clamp 15 is set to low and no CAN message
is present at the corresponding CAN inter-
face.
A CAN message can wake the unit from
sleep mode.
Depending on the device design, a level
change at clamp 15 or the detection of a
certain acceleration force can wake the unit
from sleep mode.
With this setting, CAN messages are sent if
clamp 15 is set to high.
Power manage-
ment – sleep tim-
er status
0x3333
0x29
U8
ro
—
0: sleep timer deactivated
1: sleep timer activated
The object can be read if clamp 15 is set to
high.
Power manage-
ment – shutdown
delay time
0x3333
0x32
U16
rw
—
Delay time in seconds
After detecting the ignition input (clamp 15)
and the CAN off state, the unit continues to
operate for the specified time and then goes
to sleep mode.
Power manage-
ment – cyclic
wake-up time
0x3333
0x35
U32
rw
—
Time in seconds
After the specified time period in sleep
mode, the unit automatically wakes up and
changes to standard mode.
This function is only active with a value > 0.
Power manage-
ment – accel.
wake-up force
0x3333
0x36
R32
rw
—
Force in g
If the accelerometer detects an acceleration
force greater than this value, the unit wakes
up and changes to standard mode.
This function is only active with a value > 0.
Power manage-
ment - CAN
sleep time
0x3333
0x41
U32
rw
—
Time in milliseconds
If the unit does not receive any CAN mes-
sages within the specified time period, it
changes to sleep mode.
This function is only active with a value > 0.
4.8 Device status
The unit can send this data via the CAN interface. The configuration is made via the following objects:
Object
Index
Subindex
Type
Default
Description
DeviceMode
0x4001
0x02
U8
rw
—
Bit 0: compatibility mode with unit CR3114
(1 s cycle)
Bit 1: forward device status via CAN bus
(1 s cycle)
Bit 2: forward complete GNSS data via CAN
bus (1 s cycle)
Bit 3: forward input/output data via CAN bus
(1 s cycle)
Bit 4: forward acceleration and gyroscope
data via CAN bus (100 ms cycle)
Status BaseID
0x4005
0x05
U16
0x200
COB ID start address for device status
transmission (1s cycle)
All data available in the respective device mode are sent via the CAN1 interface.





















































