




























Honeywell
Parameters
53
9
NOTE!
These parameters are shown, when
P13.1 = 0
9.12 EASY USAGE MENU (CONTROL PANEL: MENU PAR -> P0)
P12.6 Feedback source
0
2
2
334
0
= Fieldbus
1
= AI1
Only in API FULL
& LIMITED
2
= AI2
Only in API FULL
P12.7
0,0
100,0
%
0,0
336 0 = No minimum scaling
P12.8
0,0
100,0
%
100,0
337
100,0 = No maximum scal-
ing
P12.9
Error value inver-
sion
0
1
0
340
0
=No inversion (Feed-
back<Setpoint->Increase PI
Output)
1
=Inverted (Feedback<Set-
point->Decrease PI Output)
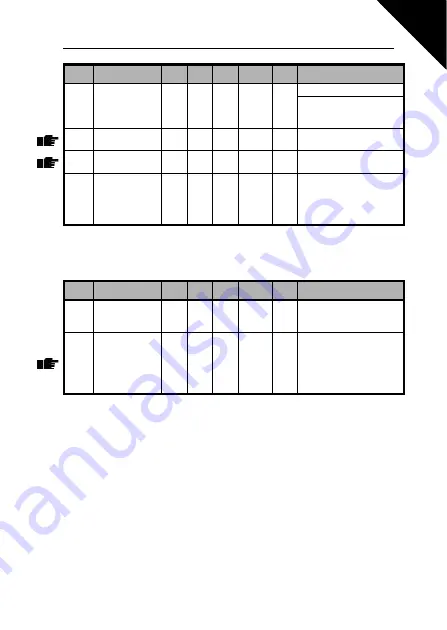
Code
Parameter
Min
Max
Unit Default
ID
Note
P13.1
Parameter
conceal
0
1
1
115
0
= All parameters visible
1
= Only quick setup
parameter group visible
P13.2
0
3
0
540
0 =
Basic
1 =
Pump drive
2 =
Fan drive
3 =
Conveyor drive (HP)
NOTE!
Visible only duriing
Startup wizard
Table 9.12: Easy usage menu parameters
Code
Parameter
Min
Max
Unit Default
ID
Note
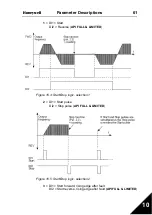
Table 9.11: PI control parameters







































































