




















Honeywell
Parameter Descriptions
75
10
10.10 PI CONTROL PARAMETERS (CONTROL PANEL: MENU PAR -> P12)
12.1
PI A
CTIVATION
0
= Not used
1
= PI for motor control
2
= PI for external use
(Only in API Full!)
12.2 PI
CONTROLLER
GAIN
This parameter defines the gain of the PI controller. If the value of the param-
eter is set to 100% a change of 10% in the error value causes the controller
output to change by 10%.
12.3
PI
CONTROLLER
I-
TIME
This parameter defines the integration time of the PI controller. If this param-
eter is set to 1,00 second the controller output is changed by a value corre-
sponding to the output caused from the gain every second. (Gain*Error)/s.
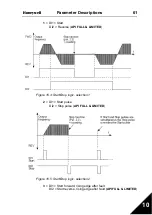
12.7
F
EEDBACK
MINIMUM
12.8
F
EEDBACK
MAXIMUM
This parameter sets the minimum and maximum scaling points for feedback
value.
Figure 10.16: Feedback minimum and maximum
0V
0mA
par. 12.7
Custom min
par. 6.3/6.7
Custom max
par.6.4/6.8
par. 12.8
10V
20mA
Controller
feedback (%)
Analoque input
with custom
min and max
scaling (%)







































































