CHAPTER 6 DEVICENET COMMUNICATION FUNCTION
15
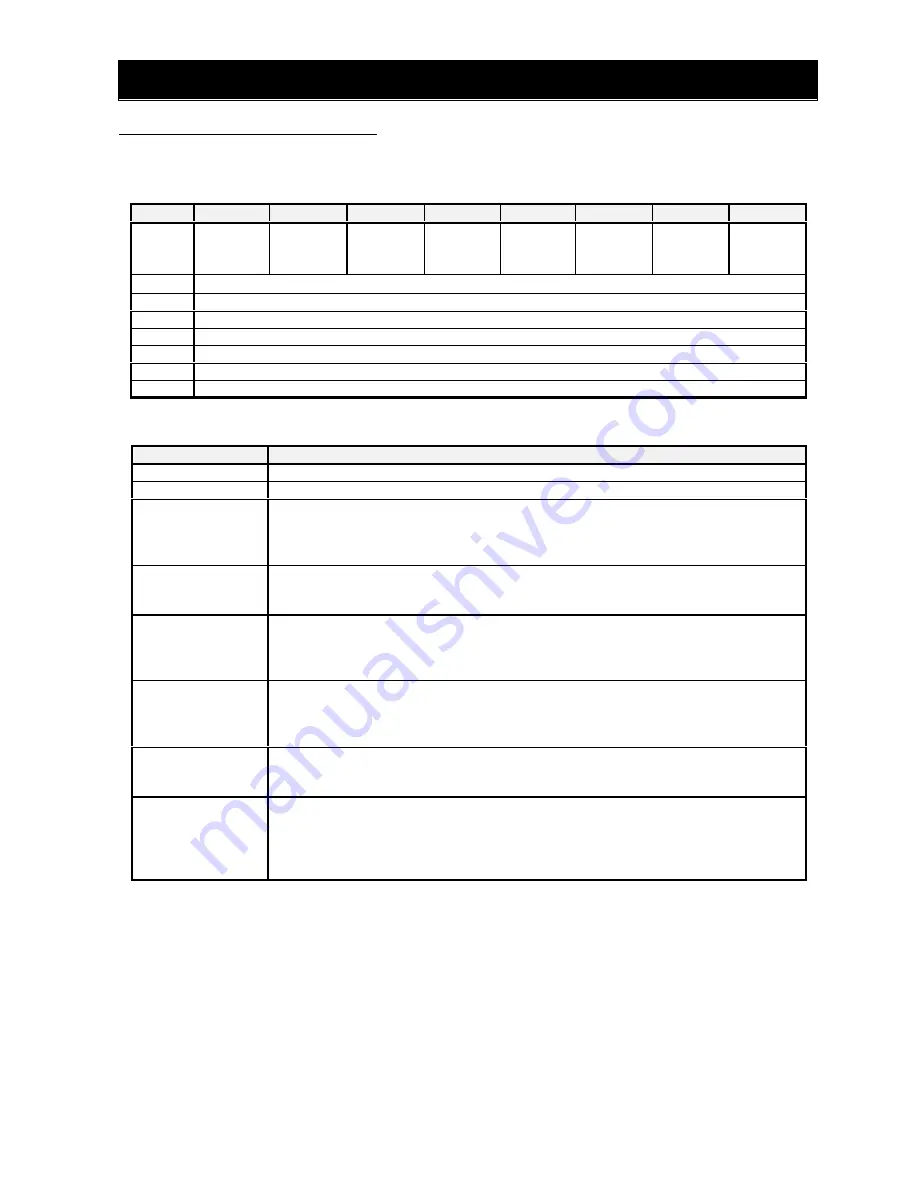
6.3.3 Hitachi inverter I/O Instance
This I/O instance is able to control the operation control, which is necessary to Hitachi inverters.
Master to SJ-DN: Instance100
(
P046: 100
)
Byte
Bit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
0
−
NetRef
NetCtrl
−
Free run
stop
Fault
Reset
Run Rev
Run Fwd
1
−
2
Speed Reference (Low Byte)
3
Speed Reference (High Byte)
4
Acceleration time (Low Byte)
5
Acceleration time (High Byte)
6
Deceleration time (Low Byte)
7
Deceleration time (High Byte)
Data
Contents
Run Fwd
The inverter is running forward run. 0:Stop 1:Run forward
Run Rev
The inverter is running reverse run. 0:Stop 1:Run reverse
Fault Reset
When the Bit is set to “1”, the trip states can be cancelled.
0:- 1:Fault reset
Case of the inverter is not in trip condition, when the Bit is set to “1”, the inverter
will stop the motor.
Free run stop
When the Bit is set to “1”, the inverter stops output and the motor enters the free
run mode.
0:- 1:Free run stop
NetCtrl
It indicates setting for method of operational command.
0:Method of operation command, which is selected at operation command
selection (A002).
1:Method of Operation command from DeviceNet is valid.
NetRef
It indicates setting for method of frequency command.
0:Method of Frequency command, which is selected at frequency command
selection(A001) and setting at Acc / Dec time(F002, F003).
1:Method of frequency and Acc / Dec time command from DeviceNet is valid.
Speed Reference
It indicates setting for output frequency of the inverter.
Range of setting:0.00 to 400.00(Hz), Resolution: 0.01(Hz ), Magnification:100
times, Transmit data:0 to 9C4O(Hex)
Acceleration time /
Deceleration time
It indicates setting for Acc/Dec time of the inverter.
Range of setting:0.1 to 3600.0(sec), Resolution:0.1(sec), Magnification:10 times
Transmit data:1 to 8CA0(Hex)
If Acceleration / Deceleration time has not been set by DeviceNet, the inverter will
use the settings in command F002 / F003.
(Note) When set both Run Fwd and Run Rev to 1, the inverter executes as stop command.