





























GK600 User Manual
Chapter 6 Specification of Parameters
-
133 -
control panel, control terminals or communication input. Multifunction MF key can be set as
forward jog or reverse jog key through parameter L0-00.
Jog can be realized using "forward jog terminal” and "reverse jog terminal” of DI, as well as via
communication input. See drive communication protocol for further information. See Jog
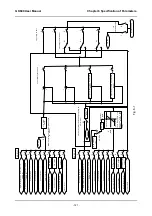
diagrammatic sketch 6-10.
Fig. 6-10
Thereof:
f1 is jog frequency b0-19. t1 represents the Accel time from zero to jog frequency, t1 = (b2-10) ×
f1/(b0-08). b0-08 is the maximum frequency. t2 is the Decel time from jog frequency to 0, t2 =
(b2-11) × f1/(b0-08).
ATTENTION:
Jog frequency set value is free from limitations of upper and lower limit frequency. Jog is
started from starting frequency and its start is not subject to limitation by b1-05. When the
jog frequency is set smaller than starting frequency, the drive will run at 0Hz.
Group b1 Start/Stop Control
b1-00
Run command
Range: 0~2
Factory default: 0
This parameter sets run command source. Run commands include "start, stop, forward and
reverse", etc.
0: Control panel control
Control run command through RUN, STOP/RESET and MF keys on control panel (set
multifunction key MF to JOG by L0-00). Refer to Chapter 4 about the operation of control
panel.
1: Terminal control
Control run command via DI terminals. Perform FORWARD and REVERSE by DI terminals.
The control mode is two-wire mode and three-wire mode selectable. See Group C0 for
details of designation and wiring regulation of DI terminals.
2: Communication control
Master device is able to control run command through built-in RS485 serial communication
f1
运行频率
时间
t1
t2
Run frequency
Time







































































