
















For PWM inputs these wait for a pulse width where the pulse high time matches the Trigger (us) value and
within the tolerance. The default is 2000us (2 ms) with a tolerance of +- 20%. Use the Acquire button to sample
the current PWM pulse and save it to the uS box. Be sure the tolerance is set to 10% or more.
Input Safety Override, Output Status
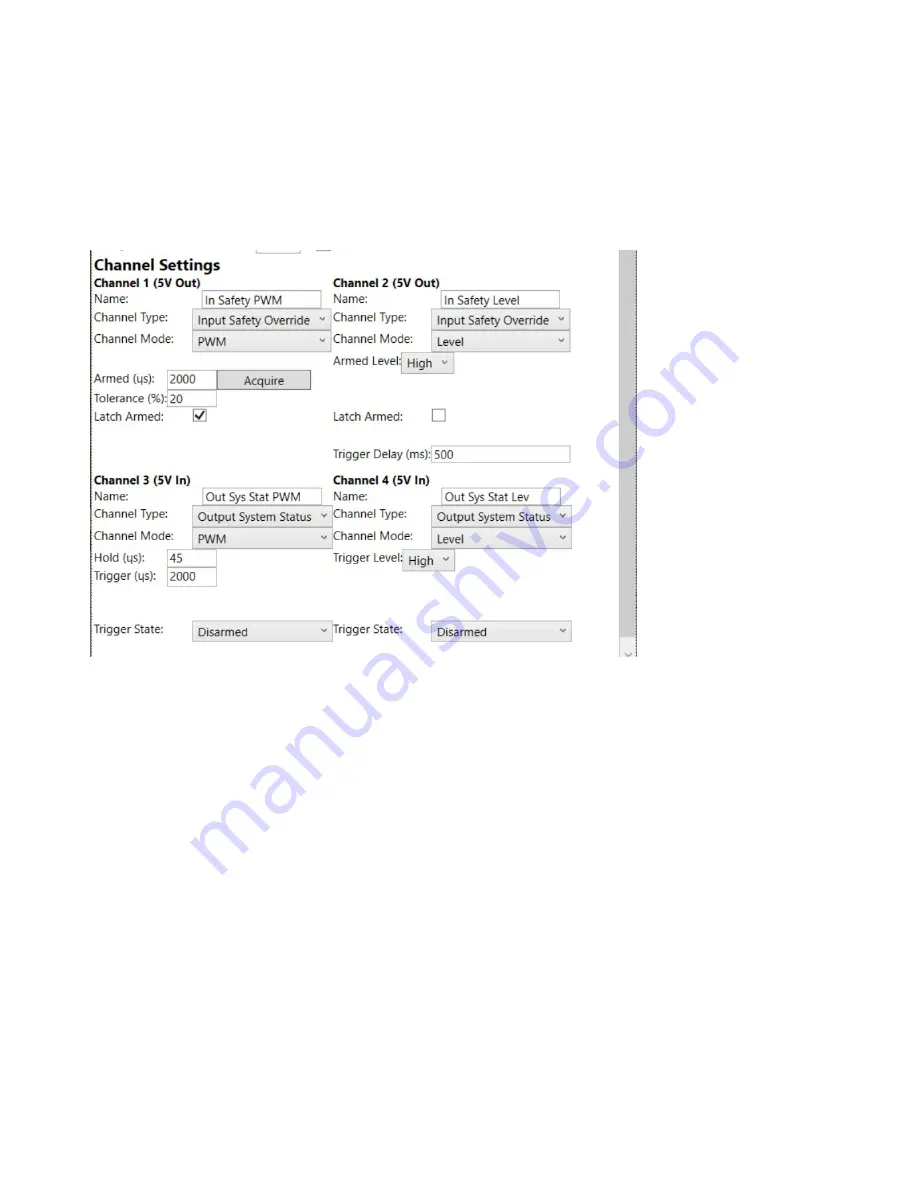
The screenshot below shows the SATS channels programmed for four variants of Input Safety, and Output
System Status.
Channel 1 and Channel 2 - Safety Override
This allows an external device like the Pixhawk Autopilot auxiliary channel to manually assert a safety override
of the SATS-MINI. If configured the default is to stay in safety unless the armed uS or level, depending on
configuration, are met. For example Channel 1 is set to look for a 2000us wide PWM pulse. The SATS-MINI will
stay in the Safety as long as the PWM input pulse does not match 2000us (+- tolerance). Once the PWM pulse
matches then the SATS-MINI goes into the armed state. If Latch Armed is set the SATS-MINI will stay armed
once entered. Otherwise the SATS-MINI can toggle between Armed and SAFETY depending on the PWM pulse.
Same basic operation applies for Level detection.
Channel 3 and Channel 4 -Output System Status
This programs the channel outputs to signal when the SATS-MINI is in a given operational status. Both PWM
and Level output types are supported. Use this for example to signal the Autopilot is the parachute system in
the Armed state or Safety state.
Tools - Advanced Settings
Click on the Advanced Tab to configure the SATS-MINI parachute trigger conditions.
© Fruity Chutes Inc - https://fruitychutes.com







































































