





























Need support?
93
Chapter 4 Robot Dog
█
www.freenove.com
1.
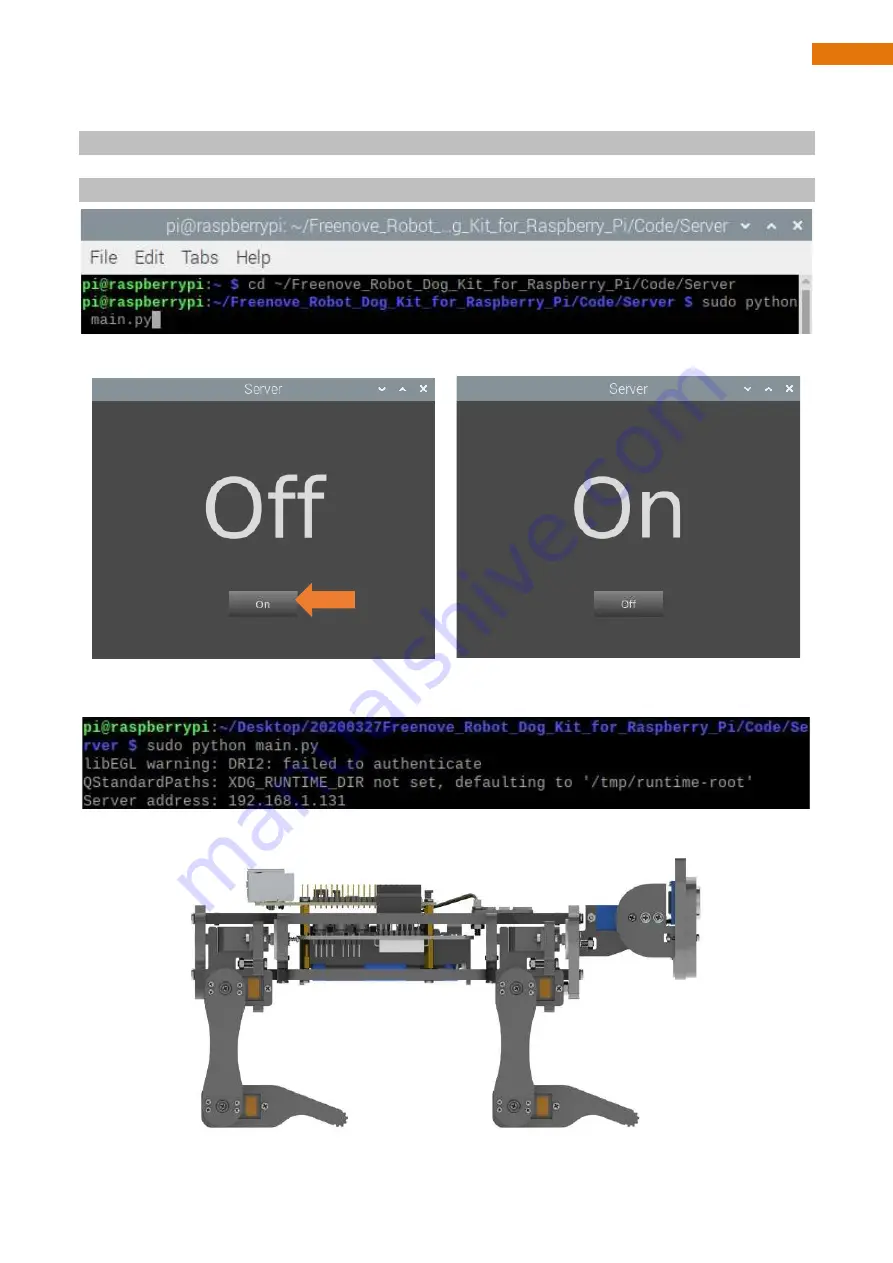
Use cd command to enter directory where main.py is located:
cd ~/Freenove_Robot_Dog_Kit_for_Raspberry_Pi/Code/Server
2.
Run main.py:
sudo python main.py
The interface is as below:
Click “On” to open the server. The result is show as below:
You will see your server address (Raspberry Pi IP), Which is the LAN IP address of your Raspberry Pi. In the
next chapter, you will need to enter this IP address to connect the Raspberry Pi client with the server.
The robot will start from this posture. We define it as
Relax mode
. It will also be referenced later.
Содержание Raspberry Pi 2 Model B
Страница 35: ...Need support support freenove com 33 Chapter 0 Raspberry Pi Preparation www freenove com ...
Страница 71: ...Need support support freenove com 69 Chapter 2 Assemble Robot www freenove com M3 Nut M3x12 ...
Страница 98: ...Need support support freenove com 96 Chapter 4 Robot Dog www freenove com ...
Страница 105: ...Need support support freenove com 103 Chapter 4 Robot Dog www freenove com Installation is successful ...
Страница 111: ...Need support support freenove com 109 Chapter 4 Robot Dog www freenove com Click Continue Click Agree ...





















































