























ExRobotics B.V.
ExR-2 Robot
Operating Guide
Document No.:
20220412IP1
Version No.: 2
Owner:
Ian Peerless
Date:
2022-04-30
Page 8 of 39
This document is considered an uncontrolled copy when printed. Always ensure that you print and use a current version.
Copyright 2022 ExRobotics B.V.
4.
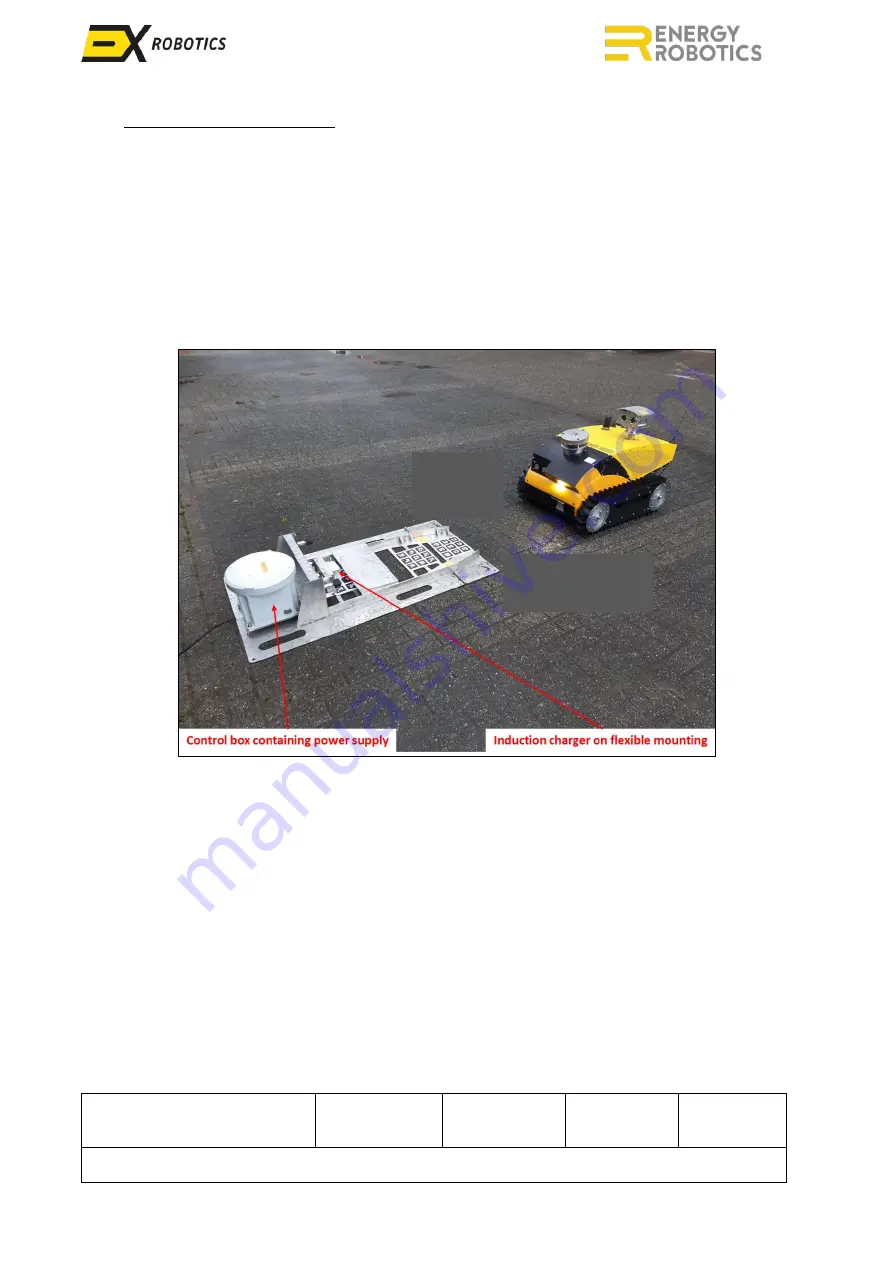
Docking Stations & Charging
A robot automatically charges itself using the induction charger built into its docking station. It can
also autonomously dock and undock as described in Section 7. If the robot is being remotely
controlled,
the operative should approach the docking station in “slow speed” mode and in the
direction shown in the picture below. Provided the robot is reasonably straight and central when
approaching the docking station, the robot will automatically align the induction charging plates
using the plastic strips under its hull. To facilitate robot alignment, the robot should approach the
docking station in a straight line for at least 3 meters. Once the front o
f the robot’s hull is pressing
against the front of the docking station the operative should stop driving forwards and switch off
the motors by pressing the red button on the gamepad.
Once the induction charger is connected, the “Wireless Charger” and “Charging” boxes on the cloud
software will be checked. Hovering the cursor over the charging box will reveal the charging
current. It takes approximately 8 hours to recharge a battery pack from 10% to 90% charge.
When the robot is fully docked it will
“go to sleep”
and begin to charge using the induction charger.
There can be a delay of up to 120 seconds before this happens. When the robot is asleep, many of
its components are switched off to reduce power consumption and speed charging. However:
▪
The gas detectors remain on so that
they don’t need to “warm up” before commencing the
next mission.
▪
It continues to communicate so that it can quickly be woken up.
The docking station should be powered up at all times since charging may be disrupted if
it’
s
switched on when the robot
’s
already docked. Also, i
t’s best not to switch off the robot (using the
black On/Off switch) when the robot is in the docking station since this too can disrupt charging. If
this happens pull the robot 30cm back and switch it off and on again.







































































