

















13
8.0 S of tware op eration
The LIFTKIT's URCaps enables movement of LIFTKIT di-
rectly in the UR Polyscope environment. When going into
programming mode in Polyscope, the LIFTKIT's setup can
be accessed in the installation tab. The movement of
LIFTKIT can then be accessed directly in the Program tab.
8.1 LIFTKIT installation
The LIFTKIT's installation screen (shown below) allows to set
up three aspects of the LIFTKIT's operation: 1.
Communication, 2. Type of LIFTKIT selection, 3.
Programming of accessible positions.
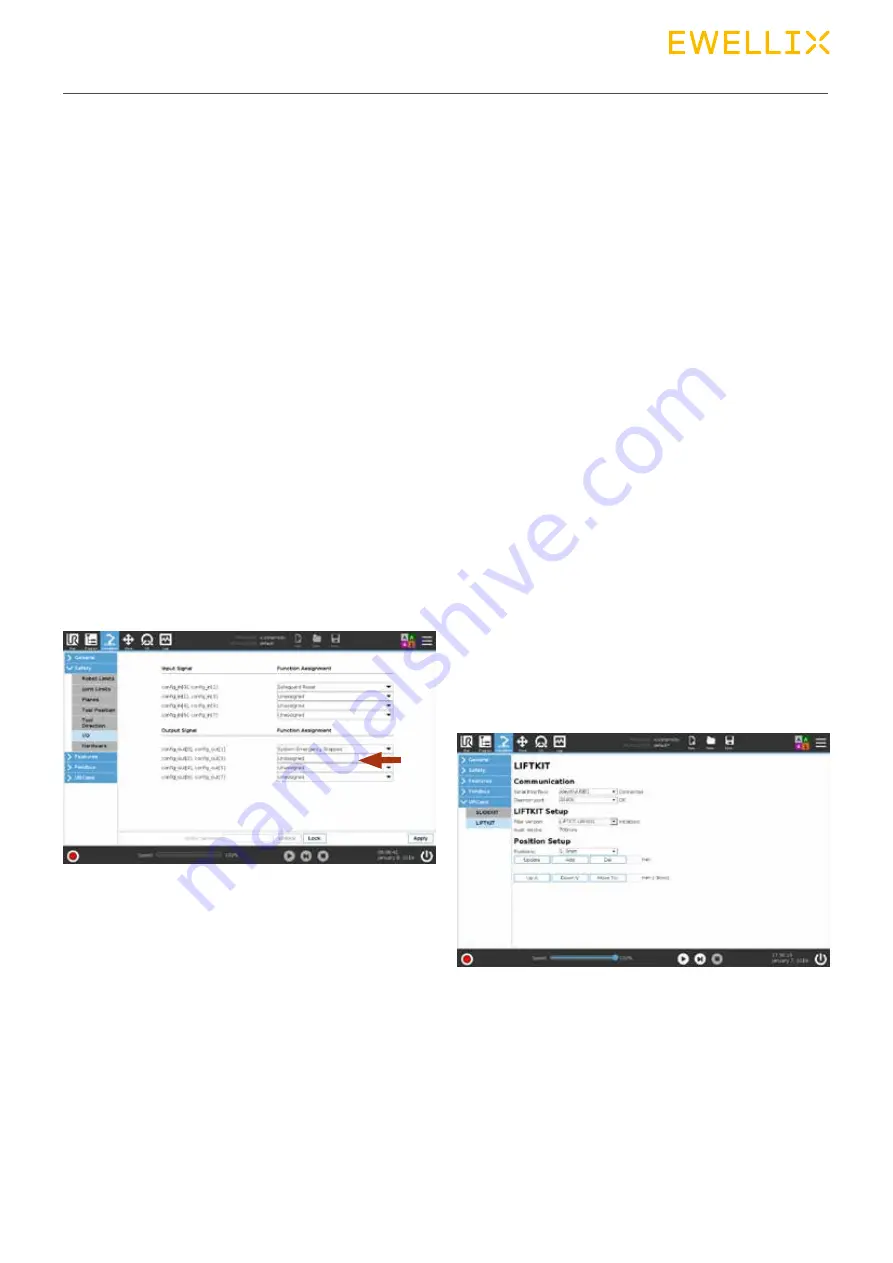
8.1.1 Safety I/O setup on UR controller
To activate LIFTKIT, the safety I/O has to be configured cor-
rectly in the UR environment. In the Safety section of the in-
stallation tab, set the relevant safety output to ‘System
Emergency Stopped’.
8.1.2 Communication
• Serial interface: Select the serial interface on the UR con-
troller that enables the connection. In case other devices
are connected, select a free serial port.
• Daemon port: Select a daemon port that is not used by
another URCaps. If the same port is used for different
URCaps, communication problems might occur and
LIFTKIT cannot operate normally.
8.1.3 LIFTKIT setup
Pillar version: Select the correct pillar version from the
drop-down menu. The important selection criteria are the
last three digits, i.e. LIFTKIT-UR-601. By selecting a wrong
configuration, a normal operation of LIFTKIT cannot be
guaranteed! If the pillar has been initialized correctly, the
maximum stroke accessible is displayed.
Check that this value corresponds with the product
connected.
8.1.4 Position setup
Up to ten positions of LIFTKIT can be set up to be accessi-
ble in the UR programming mode. To add a position, enter
the value of the position in mm and press ‘Add’. An addi-
tional position is added to the list of positions.
Similarly, positions can be deleted or updated.
The 0 mm position (fully retracted) is the default and cannot
be deleted. Note: Save the installation file to keep the se-
lected positions after a restart of the UR system.
Note: If more positions are required, a function call is availa-
ble to access any position directly (see instructions later in
this chapter).
8.0 Software operation