





























Maintenance 7. Boards
336
N6 Rev.2
Installation
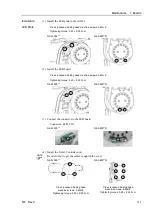
Control Board 2
(1) Install the control board #2 to the Arm #3.
Cross recessed binding head machine screws: 4-M3×6
Tightening torque: 0.45
±
0.05 N·m
Be careful not to drop the screws inside the Manipulator while removing them.
(2) Connect the connector to the control board 2.
Connector: GS02
(3) Install the Arm #3 cover.
Cross recessed binding head machine screws:
6-M4×8
Tightening torque: 0.45
±
0.05 N·m
Be careful not to get the cables caught in the cover.
(4) Turn ON the controller.
(5) Check operation to see if the Manipulator's position and posture are out of position.
Move the Manipulator to two or three points (poses) of the registered points.
(6) If the Manipulator is out of position, calibrate all the joints and axes.
For details, refer to
Maintenance 8. Calibration
.
NOTE
NOTE
Содержание N6 Series
Страница 1: ...Rev 2 EM187R3735F 6 Axis Robots N6 series MANIPULATOR MANUAL ...
Страница 2: ...Manipulator manual N6 series Rev 2 ...
Страница 8: ...vi N6 Rev 2 ...
Страница 14: ......
Страница 27: ...Setup Operation 1 Safety N6 Rev 2 15 N6 A850 R C A D F G F E H G F B G F G F F F N6 A850 BR F ...
Страница 34: ...Setup Operation 2 Specifications 22 N6 Rev 2 N6 A850 BR Cable direction Upward ...
Страница 35: ...Setup Operation 2 Specifications N6 Rev 2 23 2 3 2 Orientation with the Maximum Arm Length N6 A1000 N6 A850 R ...
Страница 50: ...Setup Operation 3 Environment and Installation 38 N6 Rev 2 N6 A1000 Maximum motion range 150 867 ...
Страница 52: ...Setup Operation 3 Environment and Installation 40 N6 Rev 2 N6 A850 R Maximum motion range 802 ...
Страница 66: ...Setup Operation 4 End Effectors 54 N6 Rev 2 N6 A850 R Unit mm ...
Страница 103: ...Maintenance This volume contains maintenance procedures with safety precautions for the N6 series Manipulators ...
Страница 104: ......
Страница 274: ...Maintenance 4 Cable 262 N6 Rev 2 4 7 1 Signal Power cable ...
Страница 275: ...Maintenance 4 Cable N6 Rev 2 263 ...
Страница 276: ...Maintenance 4 Cable 264 N6 Rev 2 4 7 2 User Cable ...
Страница 293: ...Maintenance 5 Actuator Units N6 Rev 2 281 N6 A1000 N6 A850 R Joint 2 actuator unit Joint 2 actuator unit ...





















































