












EME Controller OE5JFL May 2009
Page 4 of 13
Input/Output:
For encoder and motor connection the necessary I/O lines
of the controller are provided at a 20pin connector.
P1.0 ... P1.2 : Az encoder, P1.3 : Az PWM
P1.4 ... P1.6 : El encoder, P1.7 : El PWM
P2.4, P2.5 : Az motor clw,ccw P2.6, P2.7 : El motor up,down
P3.2, P3.3, P3.4, P3.5: future applications
You can design your own input/output drivers, or use the interface
board described below.
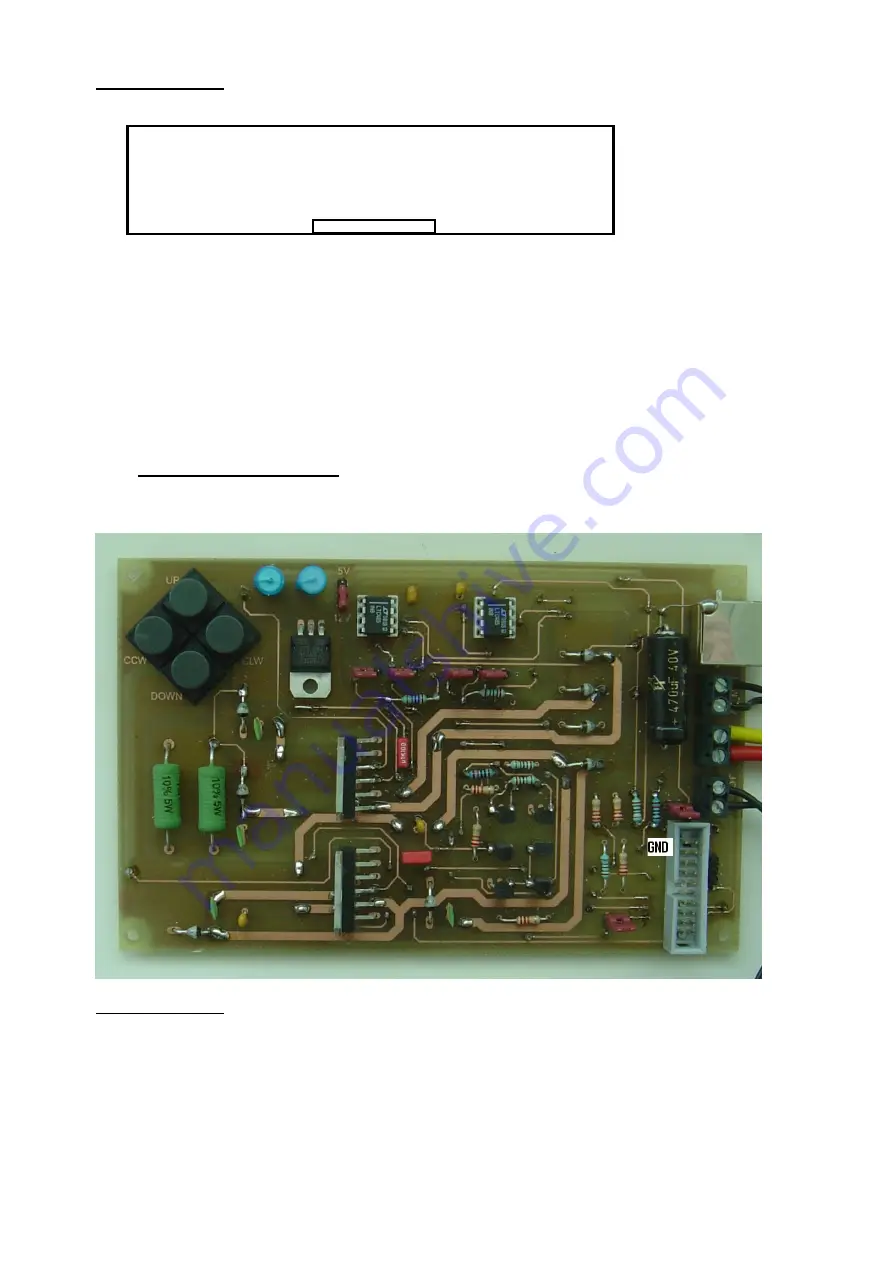
2.Interface board
The interface board is connected to the controller board via the 20pin
connector.
Motor output:
The four controller output signals (P2.4 - P2.7) are activated
(low) in
automatic mode
. They are amplified by two MOS H-bridges
which can drive DC motors up to 36V/2A. The DC motor inputs must
both be isolated from GND!!
By setting the two jumpers JP6, JP7 a PWM signal for soft start and
slowing down is activated.
If you want to move the antenna in
manual mode
, switch auto mode
off at the controller, and press the corresponding buttons on the
interface board
.
P1.1 P1.3 P1.5 P1.7 P2.5 P2.7 P3.3 P3.5 GND GND
o o o o o o o o o o
P1.0 P1.2 P1.4 P1.6 P2.4 P2.6 P3.2 P3.4 +5V +12V
o o o o o o o o o o







































































