
























Copyright © 2001-2018, Dr Robot Inc. All Rights Reserved.
www.DrRobot.com
V.03.02.18.Q
- 11 -
III.
Operation of Jaguar Robot
End user could develop his own Jaguar control program using the supplied development API and tools. Here, we
will show you how to control the robot using the included “Jaguar Control Program” (Note: You need to install
Google Earth program and other third party program first).
Turn on/off the Platform
Please follow the steps below to power up the robot.
1. Turn to release the red button.
2. Press and hold the start button for about 1 second, then release.
If you see the green LED on the start button is on, the system is powered up.
If not, please check the battery to make sure it is fully charged.
* To power off the robot, push down the red button, the system will shut down.
Using Dr Robot Jaguar Control Program
After turn on the robot, please make sure your PC could find the WiFi network with SSID “DriJaguar”, and
connect with this network with key “drrobotdrrobot”. After successful connection, please fix your PC IP address
as “192.168.0.104” at this wireless interface. You could try to ping the main control module by command “ping
192.168.0.60” to make sure the connection work well.
This program will demonstrate how to control and navigate the Jaguar, move the flipper arms and how to
interpret, process, display and log multi-sensor information. This program is provided with source code (c#).
updates motor encoder reading, motor temperature, board voltage and battery voltage measured
at 10Hz;
reads and displays IMU and Laser Range sensor data;
displays GPS readings on the Google Earth;
displays and controls camera.
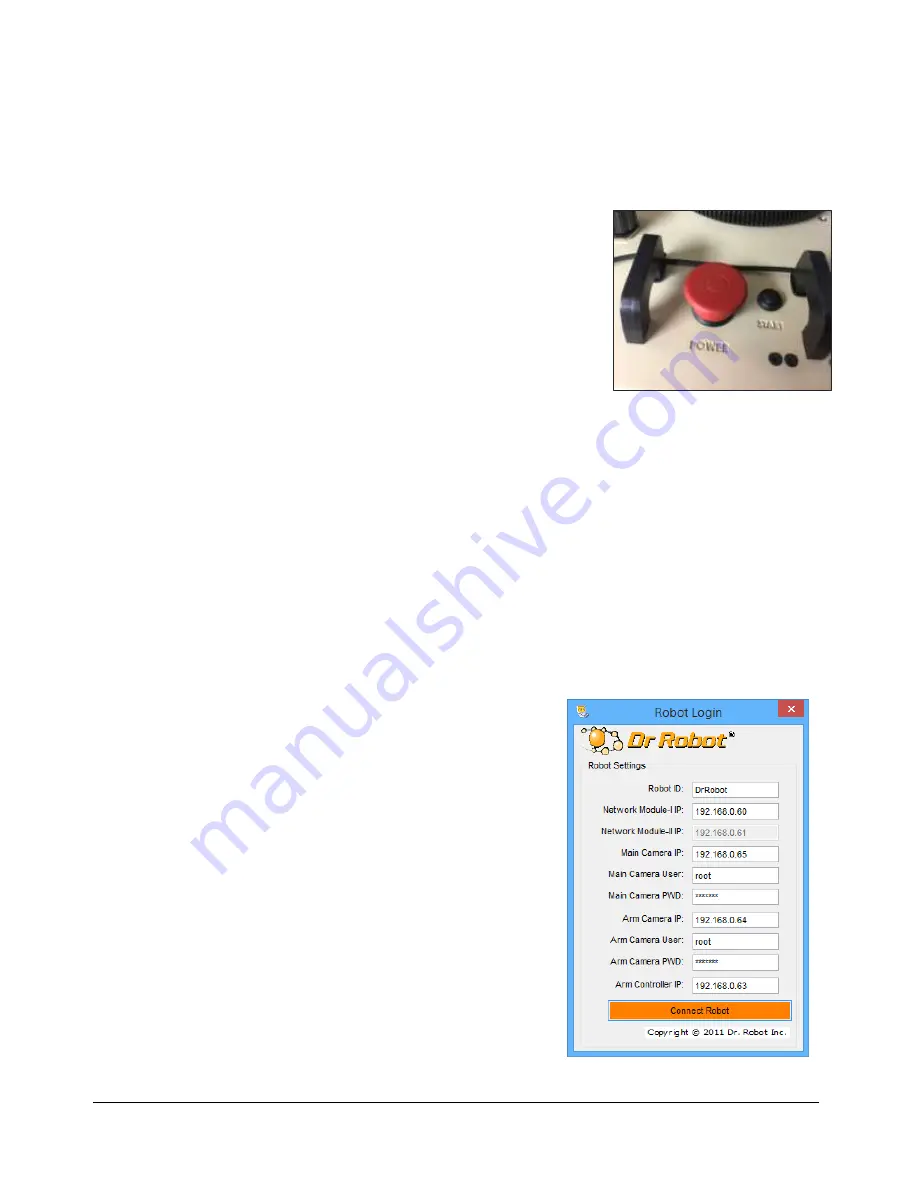
Once you start this program, you will see a “Login Window”