




















24
KR
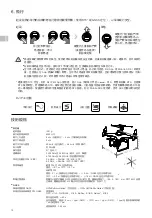
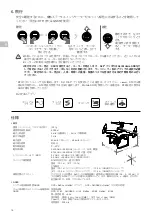
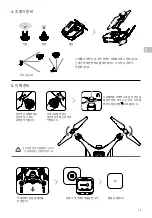
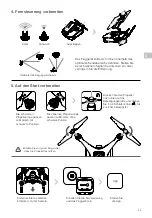
6.
비행
안전한
이륙을
위해
기체
상태
표시등이
녹색으로
천천히
깜박이는지
확인하십시오
(
포지셔닝을
위해
RTK*
또는
GNSS
를
사용
).
•
회전하는
프로펠러는
위험할
수
있습니다
.
회전하는
프로펠러와
모터에서
멀리
떨어져
계십시오
.
협소한
공간에서나
사람이
근처에
있을
때는
모터를
작동시키지
마십시오
.
•
모터가
돌아가는
동안에는
조종기를
항상
손에
잡고
있으십시오
.
•
비행
중
모터
정지
: CSC
를
수행하여
모터를
정지합니다
. DJI
앱
또는
DJI
모바일
SDK
를
통해
활성화할
수
있습니다
(
곧
지원이
제공되며
타사
앱에서
선택해야
함
).
손상
또는
부상의
위험을
줄일
수
있도록
긴급
상황에서만
비행
중에
모터를
중지하십시오
.
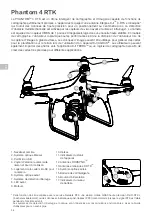
이륙
착륙
또는
스틱
조합
명령으로
모터를
시동
/
중지합니다
왼쪽
스틱
(
모드
2)
을
천천히
위로
올려
이륙합니다
.
지면에
닿을
때까지
왼쪽
스틱을
천천히
아래로
내립니다
3
초
동안
누르고
있으면
모터가
정지합니다
* RTK
포지셔닝을
권장합니다
. DJI Pilot
앱을
사용하는
경우
,
카메라
뷰
> > RTK
로
이동하여
기체
RTK
를
활성화한
후
RTK
신호를
수신하는
방법을
선택합니다
.
모바일
SDK
를
사용하는
경우
RTK
구성에
있는
SDK
문서를
참조하십시오
.
DJI Pilot
앱에서
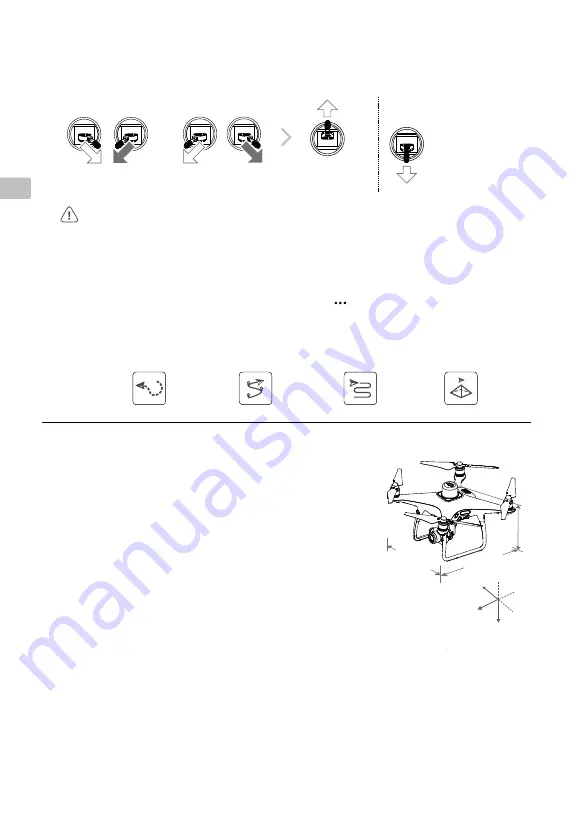
사양
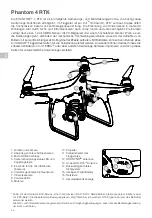
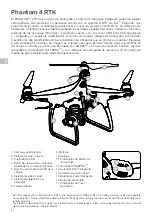
Y
289.5
mm
289.5
mm
213 mm
X
Z
18
2 m
m
172 m
m
136 mm
71 mm
수동
비행
웨이포인트
경사
매핑
•
기체
무게
(
배터리
및
프로펠러
포함
)
1391 g
최대
실용
상승
한계
고도
(
해발
)
6000 m
최대
상승
속도
6 m/s(
자동
비행
), 5 m/s(
수동
제어
)
최대
하강
속도
3 m/s
최대
속도
50 km/h(P
모드
), 58 km/h(A
모드
)
최대
비행
시간
약
30
분
작동
온도
0~40
°
C
작동
주파수
2.400 GHz ~ 2.483 GHz(
유럽
,
일본
,
한국
)
5.725 GHz ~ 5.850 GHz(
기타
국가
/
지역
)
송신기
출력
(EIRP)
2.4 GHz: < 20 dBm(CE / MIC / KCC)
5.8 GHz: < 26 dBm(FCC / SRRC / NCC)
호버링
정확도
범위
RTK
활성화
및
올바른
작동
:
수직
:
±
0.1 m,
수평
:
±
0.1 m
RTK
비활성화
:
수직
:
±
0.1 m(
비전
포지셔닝
사용
시
),
±
0.5 m(GNSS
포지셔닝
사용
시
)
수평
:
±
0.3 m(
비전
포지셔닝
사용
시
),
±
1.5 m(GNSS
포지셔닝
사용
시
)
이미지
위치
오프셋
카메라
중심의
위치는
기체
본체
축
아래에
위치한
내장
D-RTK
안테나의
위상
중심에
비례합니다
:(36, 0, 192
mm)
이미
Exif
데이터의
이미지
좌표에
적용되어
있습니다
.
기체
본체의
양의
x, y
및
z
축은
각각
기체의
전방
,
오른쪽
,
아래쪽을
가리킵니다
.
•
GNSS
싱글
주파수
고감도
GNSS
GPS + Galileo*(
아시아
), GPS + G Galileo*(
기타
지역
)
멀티
주파수
다중
시스템
고정밀
RTK GNSS
사용
주파수
GPS: L1/L2, GLONASS: L1/L2, BeiDou: B1/B2, Galileo*: E1/E5
최초
고정
시간
: < 50
초
포지셔닝
정확도
:
수직
1.5 cm + 1 ppm(RMS),
수평
1 cm + 1 ppm(RMS).
1ppm
은
1km
움직일
때
1mm
증가하는
오류를
나타냅니다
.
속도
정확도
: 0.03 m/s
Содержание Phantom 4 RTK
Страница 75: ...RTK SDK www dji com ...







































































