6
©
2015 DJI. All Rights Reserved.
Manifold
User Manual
Pr
oduct Pr
ofile
Pin #
Signal
Voltage
1
NULL
-
2
NULL
-
3
NULL
-
Pin #
Signal
Voltage
4
GND
0 V
5
TXD
3.3 V
6
RXD
3.3 V
Access UART2 from
dev/ttyTHS1
in the kernel.
UART 2 Port Definition
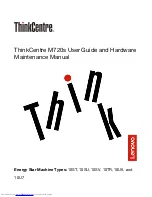
UART Port 3
Pin #
Signal
Voltage
1
NULL
-
2
RXD
3.3 V
Pin #
Signal
Voltage
3
TXD
3.3 V
4
GND
0 V
Access UART3 from
dev/ttyTHS3
in the kernel.
UART 3 Port Definition
CAM_IN and CAM_OUT Port
CAM_IN and CAM_OUT port are mainly serves as the interface between the camera mounted
on the Matrice 100 and the Manifold. Refer to the Manifold product page for details on how to
connect the camera to the Manifold.
CAM_IN / CAM_OUT Ports
EXPANSION I/O
CAM_IN
HDMI
CAM_OUT
Содержание Manifold
Страница 1: ...MANIFOLD 2015 11 V1 0 User Manual ...