














Tel/Fax: 0755-82734836
www.dh-robotics.com
23
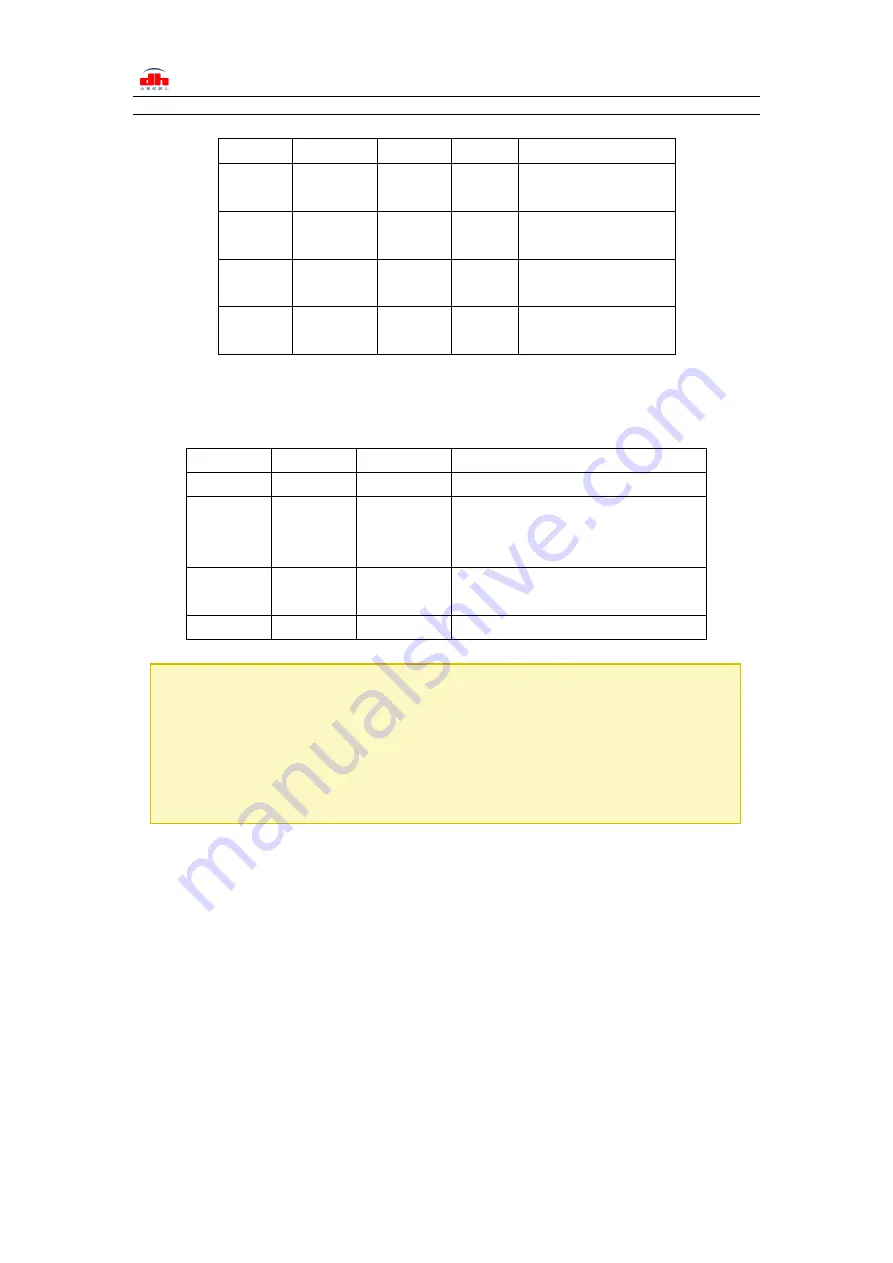
Table 3.1 Input State
INPUT 1
INPUT 2
Pin state
I/O
state
Perform action
No wiring
No wiring
0 0
Group 1
Target position 1,target
force 1,target speed 1
0V
No wiring
1 0
Group 2
Target position 2,Target
Force 2,Target Speed 2
No wiring
0V
0 1
Group 3
Target position 3,Target
Force 3,Target Speed 3
0V
0V
1 1
Group 4
Target position 4,Target
force 4,target speed 4
You can also get the gripper state by detecting the states of Output1 and Output 2(0V and high
resistance states). as shown in Table 3.2.
Table 3.2 Output1 Output2 State
OUTPUT 1
OUTPUT 2
I/O
State
State description
No wiring
No wiring
0 0
Fingers are in motion
0V
No wiring
1 0
Fingers are at reference position,
No object detected or object has been
dropped
No wiring
0V
0 1
Fingers have stopped due to an object
detection
0V
0V
1 1
The gripper detects an object falling
The four states of IO mode can be configured through Modbus RTU protocol of RS485, or the
parameters of gripper can be configured through our debugging software. Please refer to the
previous section for specific configuration mode. After the four groups of parameters are configured,
the gripper can be controlled by setting the Input 1 and Input 2 pin states, and the clamp state can
be obtained by detecting the Output 1 and Output 2.
NOTE
·
Digital IO default input and output are NPN type, input and output are 0V valid (low
level valid).
·
Input and output can be configured. If it needs to be changed to PNP type, the input
and output of 24 V is effective (high level is effective), it is necessary to communicate
with our company in advance.







































































