










(/wiki/index.php/File:RomeoV11.jpg)
{kind=link}
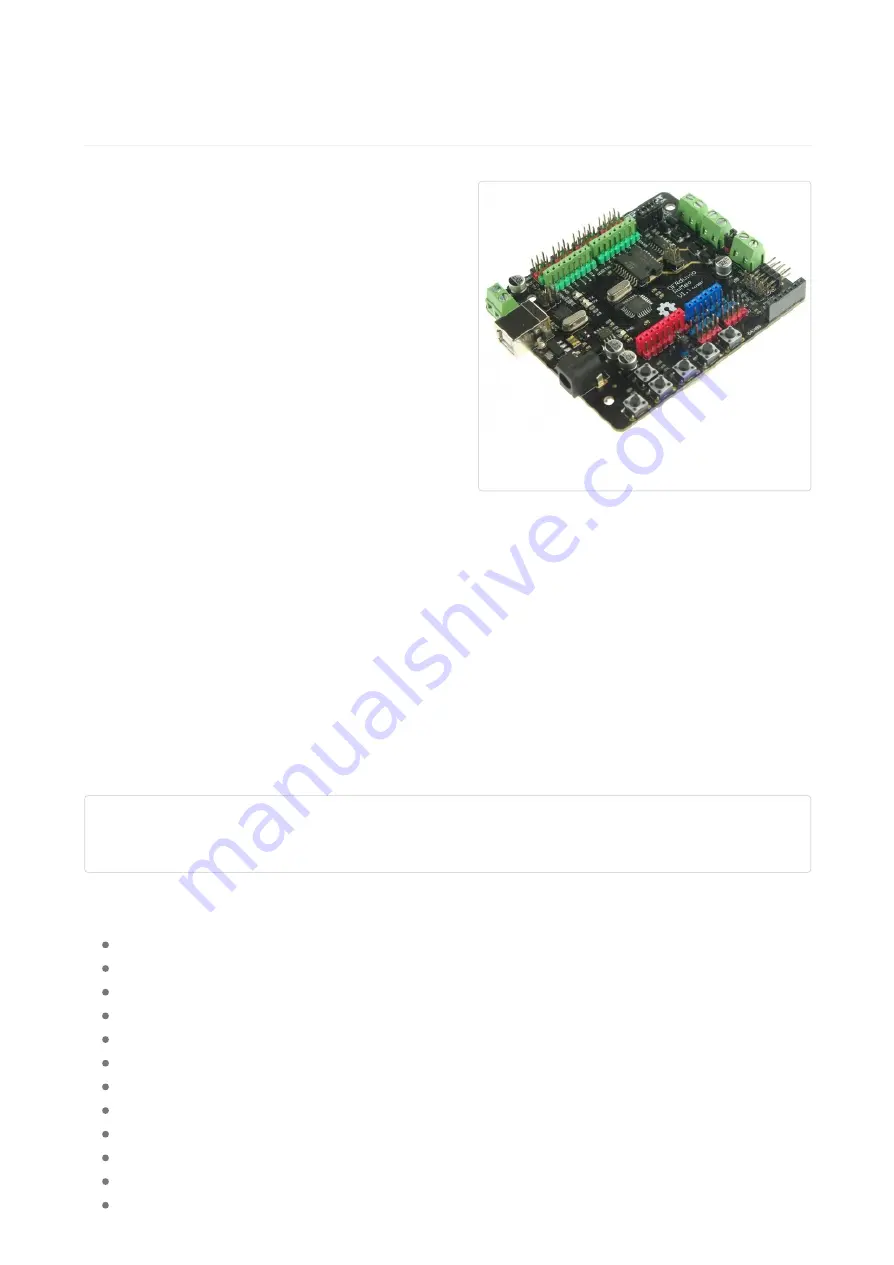
DFRduino RoMeo V1.1
DFRduino RomeoAll in one Controller
V1.1(SKU:DFR0004)
Contents
1 Introduction
2 Specification
3 DFRduino RoMeo Pinout
4 Before you start
4.1 Applying Power
4.2 Software
5.1 Servo Power Select Jumper
5.2 Motor Control Pin Jumper
6.1 Button Press
6.2 Example use of Button 15
7.1 Hardware Setting
7.2 Pin Allocation
7.3 PWM Control Mode
7.4 PLL Control Mode
Introduction
RoMeo is an AllinOne microcontroller especially designed for robotics application. Benefit
from Arduino open source platform, it is supported by thousands of open source codes, and
can be easily expanded with most Arduino Shields. The integrated 2 way DC motor driver and
wireless socket gives a much easier way to start your robotic project.
Note:
A. Please read this manual carefully before applying power on the device.
B. Do not use this device for military or medical purpose as they are not designed to.
Specification
Atmega 168/328
14 Channels Digital I/O
6 PWM Channels (Pin11,Pin10,Pin9,Pin6,Pin5,Pin3)
8 Channels 10bit Analog I/O
USB interface
Auto sensing/switching power input
ICSP header for direct program download
Serial Interface TTL Level
Support AREF
Support Male and Female Pin Header
Integrated sockets for APC220 RF Module and DFBluetooth Module
Five I2C Interface Pin Sets