





























IMD 100 Integration manual 4189360015 Rev. G
Parameter description
Page 199 of 243
Bit
Name
Description
Bit 28
SAFETY_RUN_RESTART_
ON_LS1
New safety run after limit switch 1 cycle:
0: No automatic safety run possible after limit switch 1
is activated and the IMD is in state 16 (parked tripped)
1: If limit switch 1 is deactivated while in state 16
(parked tripped) a new safety run is automatically
initiated
Bit 29
S-RUN-SPEED_PROFILE
Enables speed profile in safety run
Bit 30
MANUAL_OP_ENABLE
0: The use of manual operation is disabled
1: The use of manual operation is enabled
Bit 31
BRAKE_HALF_POWER
0: Full output power for the brake
1: Half output power for the brake
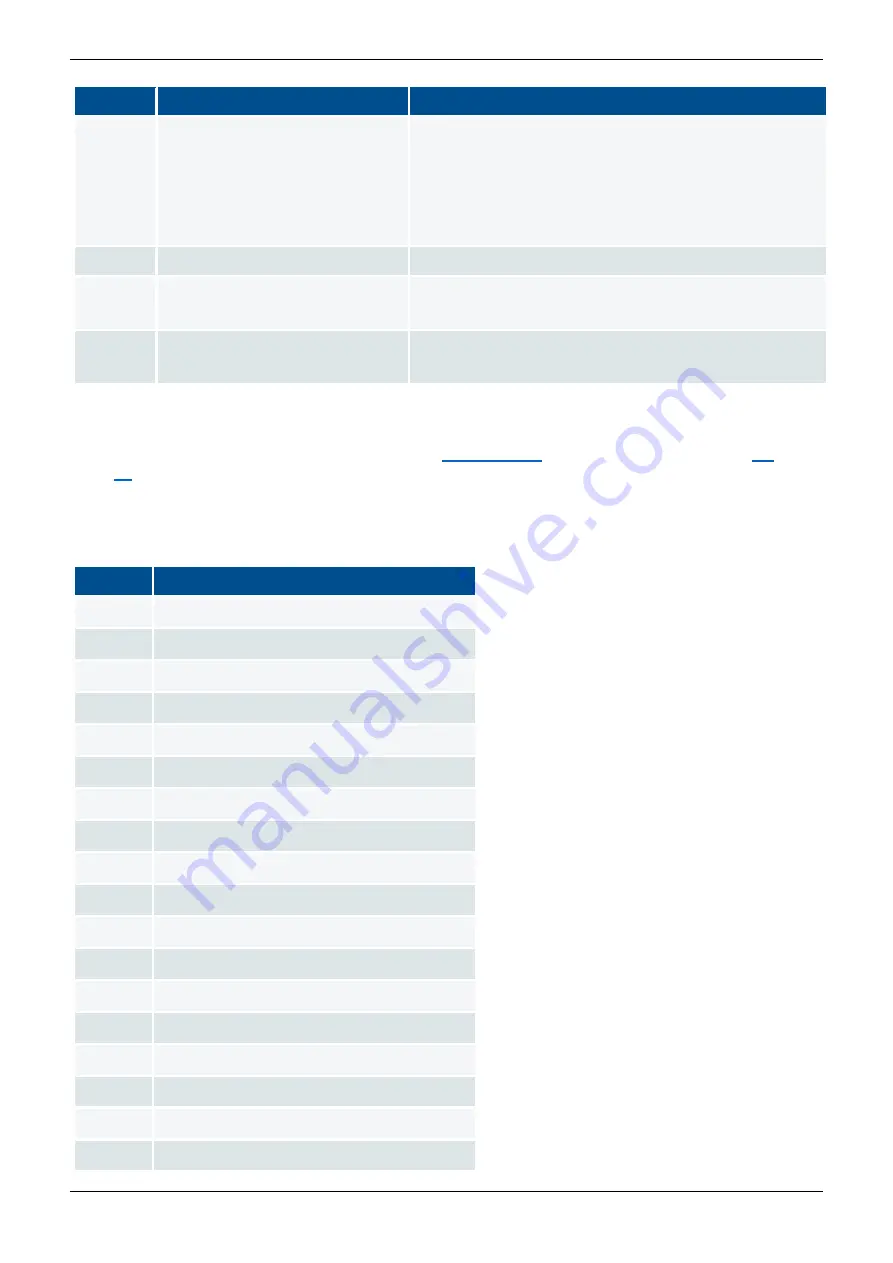
13.2.2 User state (02)
See also general definition of the parameter in the
and a description in section
, where most of the states are described. In the full list that follows, the path states are also
listed. Path states are states that are used to get into (xx entry), or get out from another state (xx exit).
Some debug states are omitted from the list.
Table 33
Reg. ID 0x02, CANopen Object ID 2002
Value
State
0
PwrOn Delay
1
Normal Operation
2
PwrOn Checking
3
PwrOn @Parked
4
PwrOn not parked cold
5
PwrOn not parked
6
Start-up Fatal error
7
PwrOn @Parked tripped
8
CAN timeout
9
Blind safety run initiate
10
Error- SCR tripped
11
Safety run step 0
12
Safety run pend.
13
Park not enable
14
Safety run succeeded
15
Safety run timeout
16
Parked tripped
17
Parked ready







































































