





























1-52 Min Speed Normal Magnetising [Hz]
Range:
Function:
Size
related
*
[ 0.3 -
10.0 Hz]
Set the required frequency for normal
magnetising current. If the frequency is
set lower than the motor slip frequency,
1-50 Motor Magnetisation at Zero Speed
and
1-51 Min Speed Normal Magnetising
are inactive.
Use this parameter along with
1-50 Motor Magnetisation at Zero Speed
.
See
.
NOTE
1-52 Min Speed Normal Magnetising [Hz]
will not have effect
when
= [1] PM, non salient SPM.
1-58 Flystart Test Pulses Current
Range:
Function:
Size
related
*
[ 0 -
0 %]
Set the magnitude of the magnetizing current
for the pulses used to detect the motor
direction. The value range and function
depends on parameter
:
[0] Asynchron: [0-200%]
Reducing this value will reduce the generated
torque. 100% means full nominal motor
current. In this case the default value is 30%.
[1] PM non salient: [0-40%]
A general setting of 20% is recommended on
PM motors. Higher values can give increased
performance. However, on motors with back
EMF higher than 300VLL (rms) at nominal
speed and high winding inductance (more
than 10mH) a lower value is recommended to
avoid wrong speed estimation. The parameter
is active when
is enabled.
NOTE
See description of
for an overview of
the relation between the PM Flying Start parameters.
1-59 Flystart Test Pulses Frequency
Range:
Function:
Size
related
*
[ 0 -
0 %]
The parameter is active when
is enabled. The value range and function
depends on parameter
[0] Asynchron: [0-500%]
Control the percentage of the frequency for
the pulses used to detect the motor direction.
Increasing this value will reduce the generated
torque. In this mode 100% means 2 times the
slip frequency.
[1] PM non salient: [0-10%]
This parameter defines the motor speed (in %
of nominal motor speed) below which the
Parking function (see
and
1-59 Flystart Test Pulses Frequency
Range:
Function:
will become active. This
parameter is only active when
is set to
[1] Parking
and only after
starting the motor.
NOTE
Do NOT set this parameter too high in high inertia
applications.
3.3.7 1-6* Load Depend. Setting
1-60 Low Speed Load Compensation
Range:
Function:
100 %
*
[0 - 300
%]
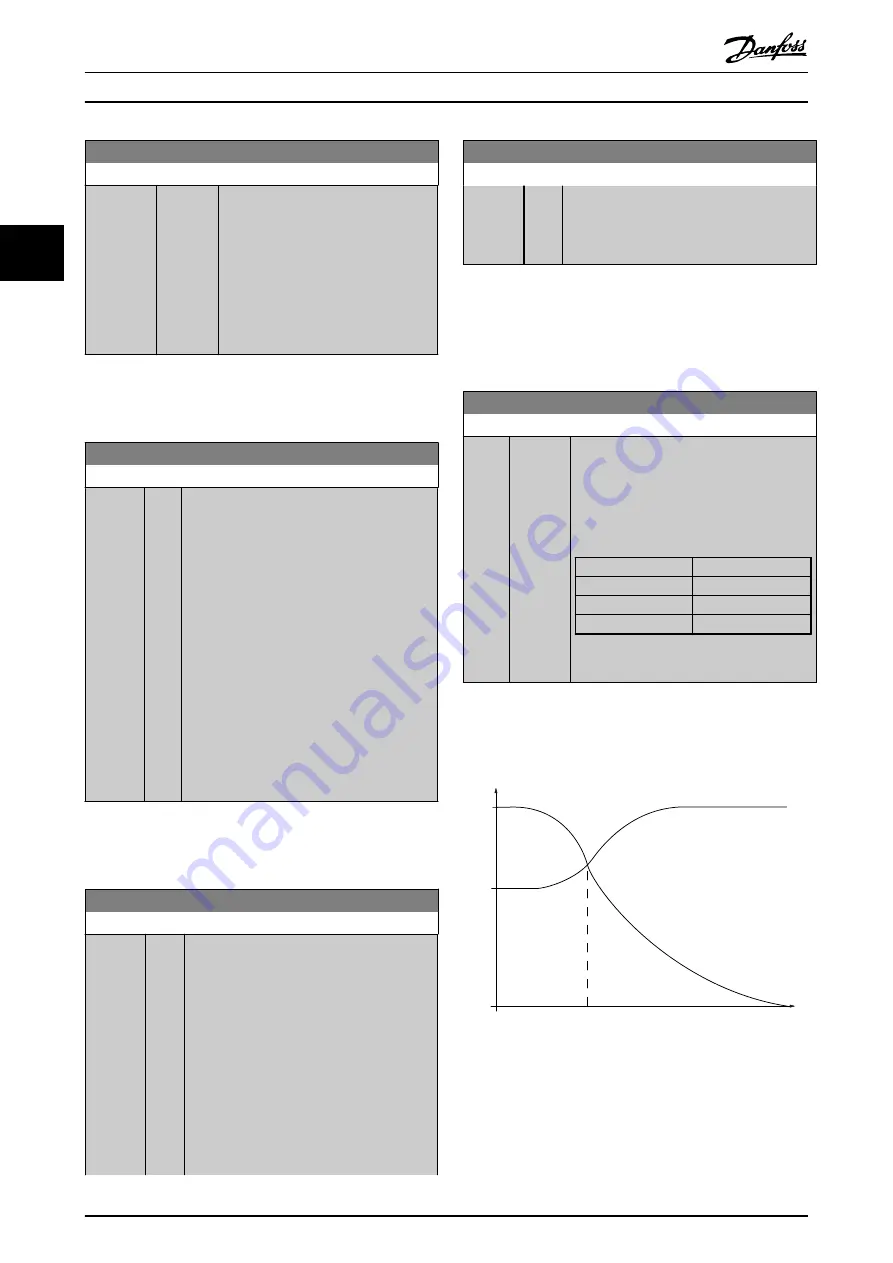
Enter the % value to compensate voltage in
relation to load when the motor is running
at low speed and obtain the optimum U/f
characteristic. The motor size determines the
frequency range within which this parameter
is active.
Motor size [kW]
Change over [Hz]
0.25 -7.5
< 10
11-45
< 5
55 -550
< 3-4
Table 3.7
NOTE
1-60 Low Speed Load Compensation
will not have effect
when
= [1] PM, non salient SPM.
130BA046.11
60%
0%
100%
U
m
Changeover
f
out
Par.1-60
Par.1-61
Illustration 3.9
Parameter Description
VLT
®
Refrigeration Drive Programming Guide
42
MG16H102 - VLT
®
is a registered Danfoss trademark
3
3







































































