•
•
•
•
•
•
•
•
•
You can use this function when a balanced load is necessary for mechanically connected motors.
If the motor has a nominal frequency of 50 Hz, the motor is loaded with the nominal load (100% of the torque), and Load Drooping
is set to 10%, the output frequency is let to decrease 5 Hz from the frequency reference.
10.298 (ID 621) Startup Torque
Location in the menu:
P2.6.14.11
(Standard Application, Local/Remote Control Application, Multi-step Speed Control Application, PID Control Applica-
tion)
P2.6.17.11
(Multi-purpose Control Application, VACON
®
NXS)
P2.6.15.11
(Multi-purpose Control Application, VACON
®
NXP)
Use this parameter to select the start-up torque.
Torque Memory is used in crane applications. Startup Torque FWD/REV can be used in other applications to help the speed control-
ler. See
10.625 Closed Loop Parameters (IDs 612–621)
.
Selection number
Selection name
Description
0
Not Used
-
1
TorqMemory
Motor is started at the same torque as it was stopped at.
2
Torque Reference
Torque reference is used at start for the start-up torque.
3
Torque forward/Torque reverse
See ID 633 and ID 634.
10.299 (ID 626) Acceleration Compensation
Location in the menu:
P2.6.14.5
(Standard Application, Local/Remote Control Application, Multi-step Speed Control Application, PID Control Applica-
tion)
P2.6.17.5
(Multi-purpose Control Application, VACON
®
NXS)
P2.6.15.5
(Multi-purpose Control Application, VACON
®
NXP)
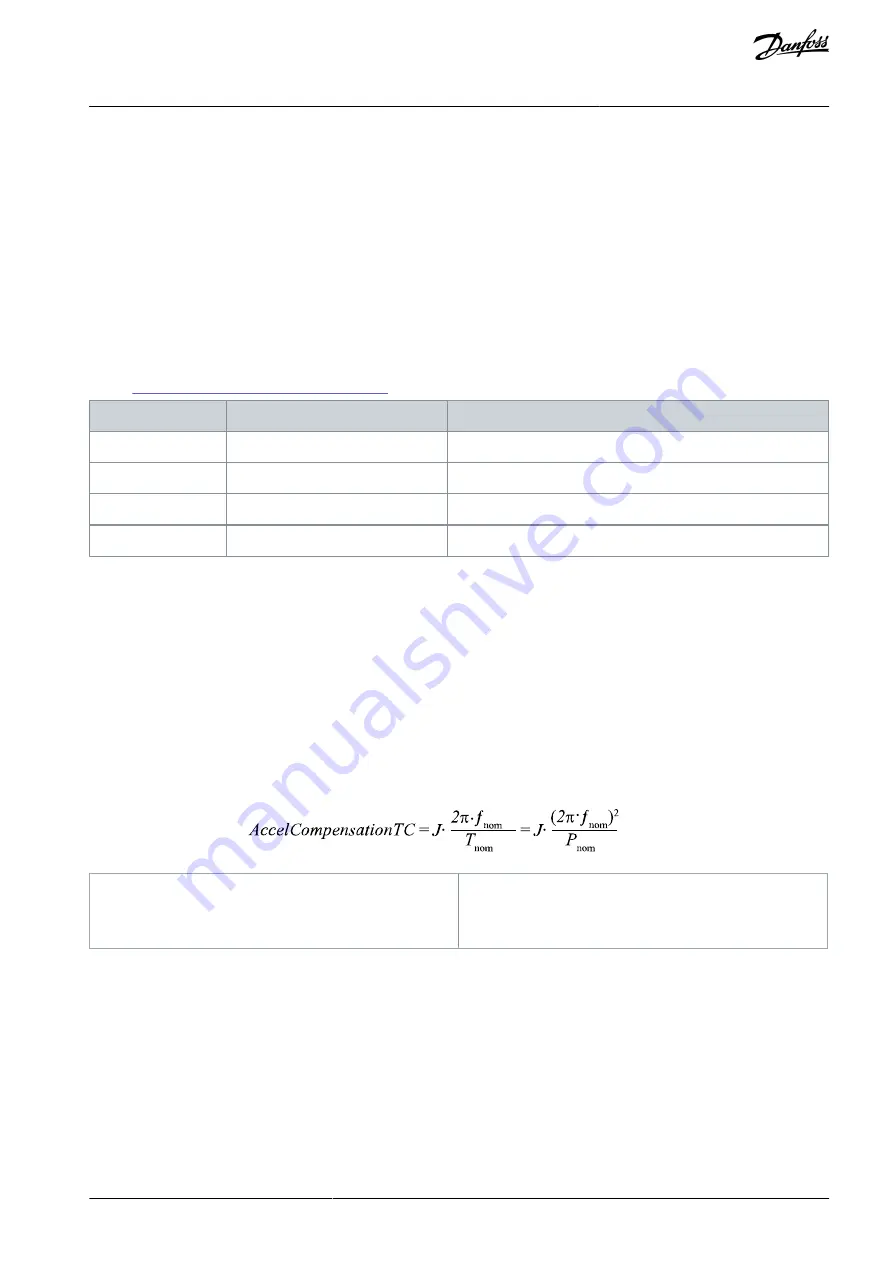
Use this parameter to set the inertia compensation to make the speed response during acceleration and deceleration more accu-
rate.
The time is defined as acceleration time to nominal speed with nominal torque. This feature is used when the inertia of the system is
known to achieve the best speed accuracy at alternating references.
e
3
0
b
h
0
8
9
.1
0
J
System inertia (kg*m
2
)
f
nom
Motor nominal frequency (Hz)
T
nom
Motor nominal torque
P
nom
Motor nominal power (kW)
10.300 (ID 627) Magnetizing Current at Start
Location in the menu:
P2.6.14.7
(Standard Application, Local/Remote Control Application, Multi-step Speed Control Application, PID Control Applica-
tion)
P2.6.17.7
(Multi-purpose Control Application, VACON
®
NXS)
P2.6.15.7
(Multi-purpose Control Application, VACON
®
NXP)
Use this parameter to set the DC current that is fed into the motor at the start.
Defines the current that is applied to motor when the start command is given (in Closed Loop control mode). At start this parameter
is used together with parameter ID 628 to decrease the time before the motor is able to produce maximum torque.
AB296635287482en-000301 / DPD00903 | 245
Danfoss A/S © 2023.02
Parameter Descriptions
VACON® NX All-in-One
Application Guide
Содержание VACON NX
Страница 1: ...Application Guide VACON NX All in One drives danfoss com...
Страница 2: ......