







7 / 9
www.cuav.net
雷迅创新
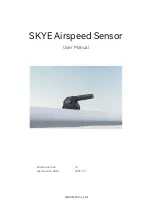
SKYE manual
Airspeed Calibration
The airspeed ratio of different installation positions and methods will be different, and the airspeed
calibration needs to be performed on the first flight;
Set the flight controller parameter ARSPD_AUTOCAL to 1 to enable automatic calibration.
Start calibration For VTOL (choose one of the following two methods):
1.
Take off in QStabilize or QLoiter mode and convert to FBWA (self-stabilizing A mode) to control
the drone to fly around 5 circles. After the ground station message bar prompts that the calibration
is complete, perform landing. After the calibration is completed, set ARSPD_AUTOCAL to 0.
2.
If you do not fly in FBWA mode, you can fly with the airspeed meter enabled but the flight controller
does not depend on the airspeed but on the airspeed (ARSPD_USE=1; ARSPD_TYPE=8; do not fly in
a high wind environment This operation); use Loiter mode to circle about 5 circles after takeoff, the
ground station message bar prompts that after calibration is completed, perform landing, and set
ARSPD_AUTOCAL to 0 after calibration is completed
ARSPD_TYPE //
Airspeed Type
ARSPD_USB //
Whether to use airspeed data (0=disable; 1=use)
ARSPD_AUTOCAL //
Auto-calibrate airspeed (0=disable, 1=enable auto-calibration)
ARSPD_BUS //
Airspeed on that I2C BUS (SKYE no need to set)
ARSPD_FBW_MAX //
Maximum flight airspeed (m/s), use the default without special requirements
ARSPD_FBW_MIN //Minimum flight airspeed (m/s), use the default without special requirements
ARSPD_OFFSET //
Airspeed offset value (do not need to be modified)
ARSPD_PIN // Airspeed Pin
ARSPD_PRIMARY //
Primary airspeed sensor
ARSPD_PSI_RANGE //
Sensor PSI (pounds per square inch) range
ARSPD_RATIO // Airspeed RATIO
ARSPD_SKIP_CAL
ARSPD_TUBE_ORDER //
Rotate static pressure and dynamic pressure