CHAPTER 2
2 - 9
COPYRIGHT
©
2000 CANON INC. CANOSCAN FB1210U REV.0 APR. 2000 PRINTED IN JAPAN (IMPRIME AU JAPON)
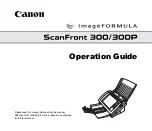
Host
Computer
ASIC
PA+
PA-
PB+
PB-
Motor
Driver
Main PCB
Drive
Motor
OUT1B
OUT1A
OUT2A
OUT2B
B. Motor Control
When the host computer sends a command to change scaling/resolution, the motor driver
current control signals [PA+, PA-, PB+, PB-] are changed to generate a torque for the rotating
speed. Yet, the reverse speed of the scanning unit is always constant.
The ASIC receives each command sent from the host computer via the USB interface to
control the motor by four-phase motor driver pulse signals [OUT1B, OUT1A, OUT2A, OUT2B].
Figure 2-8