





























23
OUT_AUX6
not used
24
OUT_SUMMARY
summary fault relay (1 == OK)
25
OUT_TRACKING
tracking fault relay (1 == OK)
26
OUT_BCPR1
reserved for beacon receiver frequency select
27
OUT_BCPR2
reserved for beacon receiver frequency select
28
OUT_BCPR3
reserved for beacon receiver frequency select
29
OUT_BCPR4
reserved for beacon receiver frequency select
30
OUT_AUX7
not used
31
OUT_AUX8
not used
The meaning of the 'FWD' / 'REV' motor control outputs depend on the motor control mode set
for this axis.
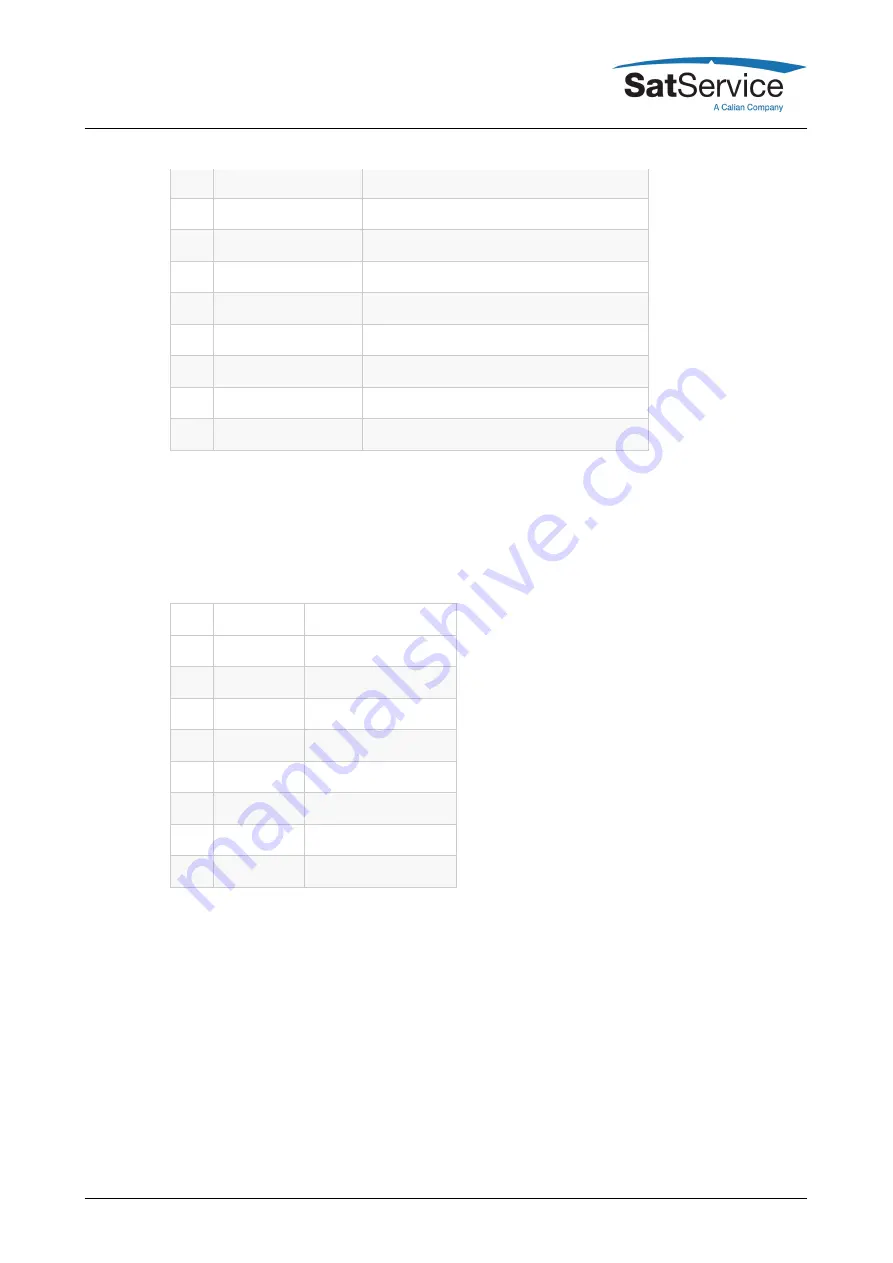
Bit definitions in 'tflt' (tracking faults):
The 'tflt' value is returned as a 8 bit hexadecimal number. The bit number 0 means the least
significant bit, bit number 7 the most significant bit in this number.
no.
name
description
0
APEAKFLT
azimuth peaking fault
1
EPEAKFLT
elevation peaking fault
2
MODELFLT
model match fault
3
JITTRFLT
jitter fault
4
-/-
not used
5
-/-
not used
6
-/-
not used
7
-/-
not used
Tracking coefficients on 'acoe' / 'ecoe':
In adaptive tracking mode the 'acoe' / 'ecoe' commands may be used to read the coefficients of
the actual model. The coefficients are returned as a comma separated list of numbers in scientific
notation. The number o f coefficients returned depends on the size of the model:
SMALL: a0,a1,a2 (1) MEDIUM: a0,a1,a2,a3,a4 (2) LARGE: a0,a1,a2,a3,a4,a5 (3)
If the beacon signal drops below it's theshold, the antenna movement is calculated from these
coefficients using the formulas shown below:
(C) 2022, SatService GmbH
www.satnms.com
ACU-19V-UM-2209 Page 49/64





















































