





























MPH-02, MPB-02, MPD-02
Master Communication
4-63
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
4.7 Analog
Interface
Brief Description
Overview
Apart from the digital master communication interfaces (SERCOS,
PROFIBUS…), the drive controllers of the IndraDrive range provide an
interface for analog master communication (analog interface). This allows
assigning an analog command value to a drive parameter (e.g. S-0-0036,
Velocity command value).
In conjunction with encoder emulation (SSI or incremental encoder) the
position control loop can be closed in a higher-level control unit. The drive
provides the possibility of, for example, emulating the actual position
value for evaluation in the control unit.
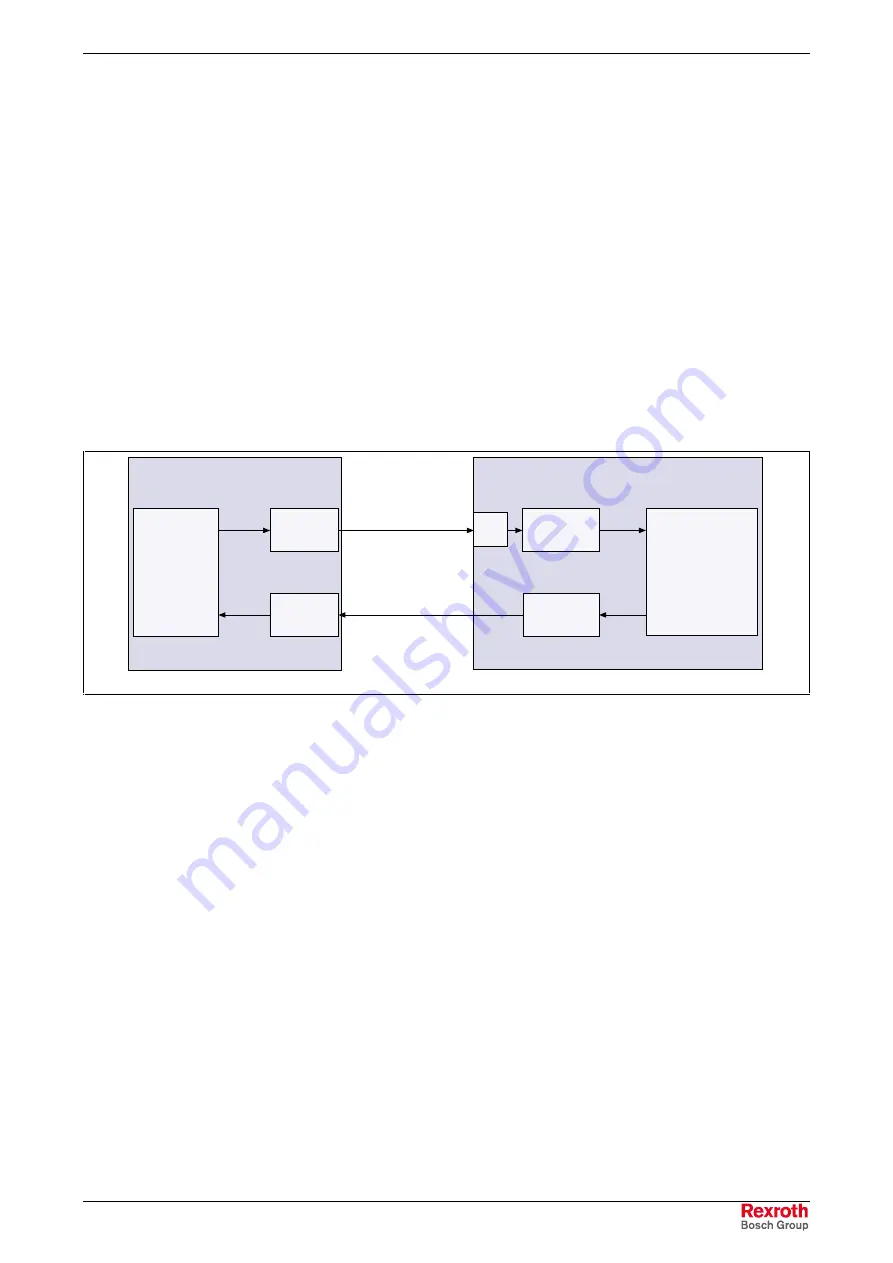
The figure below illustrates the overall structure of a drive solution with
analog interface and encoder emulation.
analog command values
SSI or incremental
A/D
position
analog
output
encoder
input
analog
assignment
encoder
emulation
v
cmd
DF000107v01_en.fh7
Drive
velocity
control
loop
Master
position
loop
Fig. 4-42:
Control loop structure (control with analog command value input and
SSI emulation)
The master communication interface with analog interface is optionally
available for the following control sections:
•
single-axis ADVANCED (configurable)
(CSH01.1C)
•
single-axis BASIC UNIVERSAL (configurable)
(CSB01.1C)
•
single-axis BASIC ANALOG (not configurable)
(CSB01.1N-AN)
This chapter describes the basic functions of the analog interface and
contains notes on commissioning and parameterization. The individual
functions used, "analog inputs" and "encoder emulation", are explained in
separate chapters.
See also "Encoder Emulation" in chapter "Extended Drive Functions"
See also "Analog Inputs" in chapter "Extended Drive Functions"
Applications
Hardware Requirements
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































