Product overview
16
Cube 1, Cube Range 1
Version 2.1
3 .3 .5
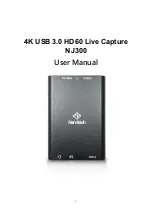
Coordinate system
The LiDAR point cloud data contains the Cartesian coordinates (x, y, z) of all detected echoes
per frame. Additionally, the coordinates are available in spherical coordinates (R,
θ
,
ϕ
), where R
is the distance from the sensor,
θ
is the elevation angle, and
ϕ
the azimuthal angle. The defini-
tions of the two coordinate systems are depicted in “Fig. 6”. The following relationships apply
for converting between the coordinate systems:
x = R × cos
θ
× sin
ϕ
y = R × cos
θ
× cos
ϕ
z = R × sin
θ
Fig. 6
Cube coordinate system. Definitions and measurements of the origin
location are identical for Cube Range 1
Содержание Cube 1
Страница 1: ...Cube 1 Cube Range 1 ...