






















Beijer Electronics Frequency Inverter BFI-E3
KI00369C 2021-09
www.beijer.se www.beijer.no
www.beijerelectronics.de www.beijerelectronics.com www.beijerelektronik.com.tr
20 (28)
5.17 PI-control
Para-
meter
Name
Default
settng
Recommended
setting
Function
P-12
Command Source
0
5
5: PI-control with external feedback signal.
P-15
Input Selection
0
0
0 = PI-feedback Terminal 4. PI or Preset speed Terminal 3.
P-16
Analog Input Format ,
terminal 4
=
0 to 10 VDC.
=
0 to 20mA.
=
4 to 20mA. Trip if signal level < 3mA.
=
4 to 20mA. Preset Speed 1 if signal level < 3mA.
P-47
2nd Analog Input
Format , terminal 6
P-20
Preset Speed 1
0
Can be set between 0 to P-02 setting ( Maximum speed)
P-41
PI Controller
Proportional Gain
1,0
PI Proportional Gain. Higher values provide a greater change in
the drive output frequency. Too high value cause instability.
P-42
PI Controller Integral
Time
1,0
PI Integral Time. Larger values provide a more damped response
for systems where the overall process responds slowly.
P-43
PI Controller
Operating Mode
0
0 : Increased motor speed gives increased feedback signal.
1 : Increased motor speed gives decreased feedback signal.
P-44
PI Digital Setpoint
0
0 : Digital Preset PI-Setpoint in P-45.
1 : Analog Input 1, Terminal 6 PI-setpoint.
P-45
PI Digital Setpoint
0,0
When P-44 = 0, PI-setpoint for PI-Controller.
P-46
PI Feedback Source
Select
0
0
0 : Analog Input 2 (Terminal 4), 1 : Analog Input 1 (Terminal 6).
2 : Motor Current.
P-48
Standby mode Timer
0 sec
0: Function off
Time to run with mimimal speed , P-02, until PI-controller enter
Sleep mode and motor stops.
P-49
PI Wake Up Error
Level
5,0 %
Level off error between PI-controllers setpoint and feedback
signal when motorn is to restart.
5.18 Energy Optimization function
The Energy Optimization function is designed to maximize the energy savings achievable when
the motor and drive is not operating at its rated load. Function works best at constant speed, as
the motor voltage is reduced, the slip of the motor may increase, resulting in a small drop in
motor speed, which can make the PI control unstable
.
Parameter
Name
Default setting
Function
P-06
Energy
Optimization
0
0 = Disabled 1 = Motor energy saving
2: Drive energy saving 3:
Motor and Drive energy saving
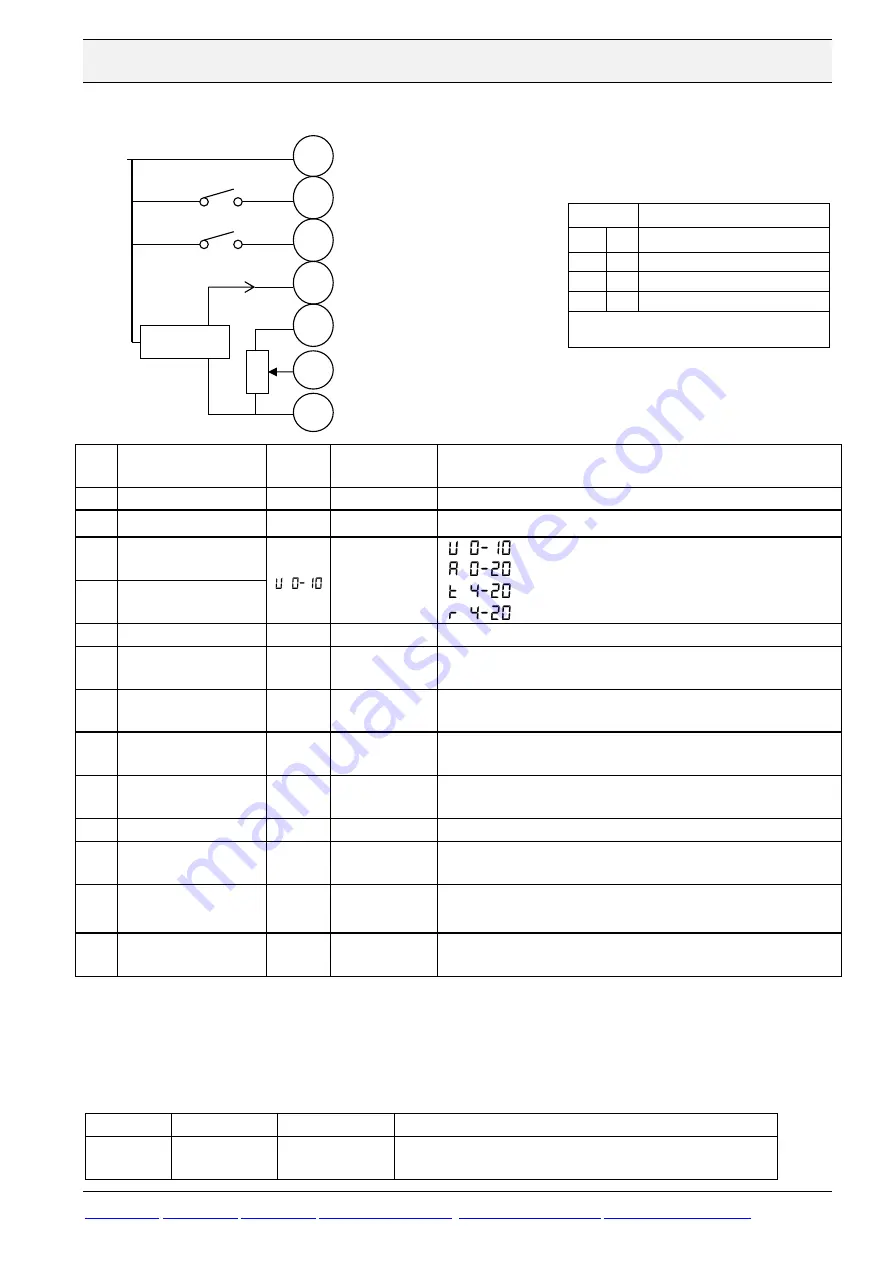
Status
Action
DI1 DI2
P12=5 & P15 = 0
0
any No output from drive
1
0
Run with PI-control
1
1
Run with PreSpeed in P-20
P-44=0: Set point in P-45
P-44=1: Analog set point on Terminal 6
2
3
4
5
6
7
1
DI1:
Start signal
DI2
: PI / Pre Speed 1
PI-feedback
+24 VDC
PI-setpoint
+10 VDC
0 VDC
0-10V / 4-20mA
Sensor







































































