





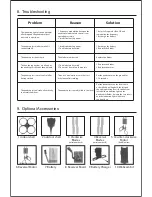


The quadcopter shakes hard.
The fine tuning buttons are all on but
the quadcopter still can’t keep balance.
The quadcopter is out of control after
having crashed.
The quadcopter can’t take off vertically
in normal conditions.
The indication light of the quadcopter
is flashing and the quadcopter does
not react to operation.
The quadcopter’s blades turn but it
cannot take off.
The blades are distorted.
1. The blades are distorted.
2. The motor doesn’t work properly.
Three-axis acceleration sensor has lost
its balance after crashing.
The quadcopter is not adjusted to the level.
1. Frequency modulation between the
quadcopter and remote control is not
operating correctly.
2. Insufficient battery power.
1. Insufficient battery power.
2. The blades are distorted.
Replace the blades.
1. Replace the blades.
2. Replace the motor.
Put the quadcopter on the ground for
5-10 seconds.
Put the quadcopter on the leveled are
or desk. Keep pulling both the left and
the right operating levers to the bottom
left until the indication light on the
quadcopter flashes. Release the two levers
and the indication light will turn to
constantly on.
1. Refer to Prepare for Take Off and
remodulate the frequency.
2. Recharge the battery.
1. Recharge the battery.
2. Replace the blades.
Solution
Reason
Problem
1 indoor shell
2 outdoor shell
3 Clockwise
Blades
(serial number A)
6 Reversal Motor
7 Battery
8 Receiver Board 9 Battery Charger
10 Webcam Kit
(Black White line)
(F182C)
4 Reversal
Blades
5 Counter-clockwise
Motor
(serial number B)
(Red Blue line)
8. Troubleshooting
9. Optional Accessories
Содержание quadrone XLC
Страница 1: ...Instructional Manual ...


































































