










Page:10
ESC32 2r1 user manual - version 0.0
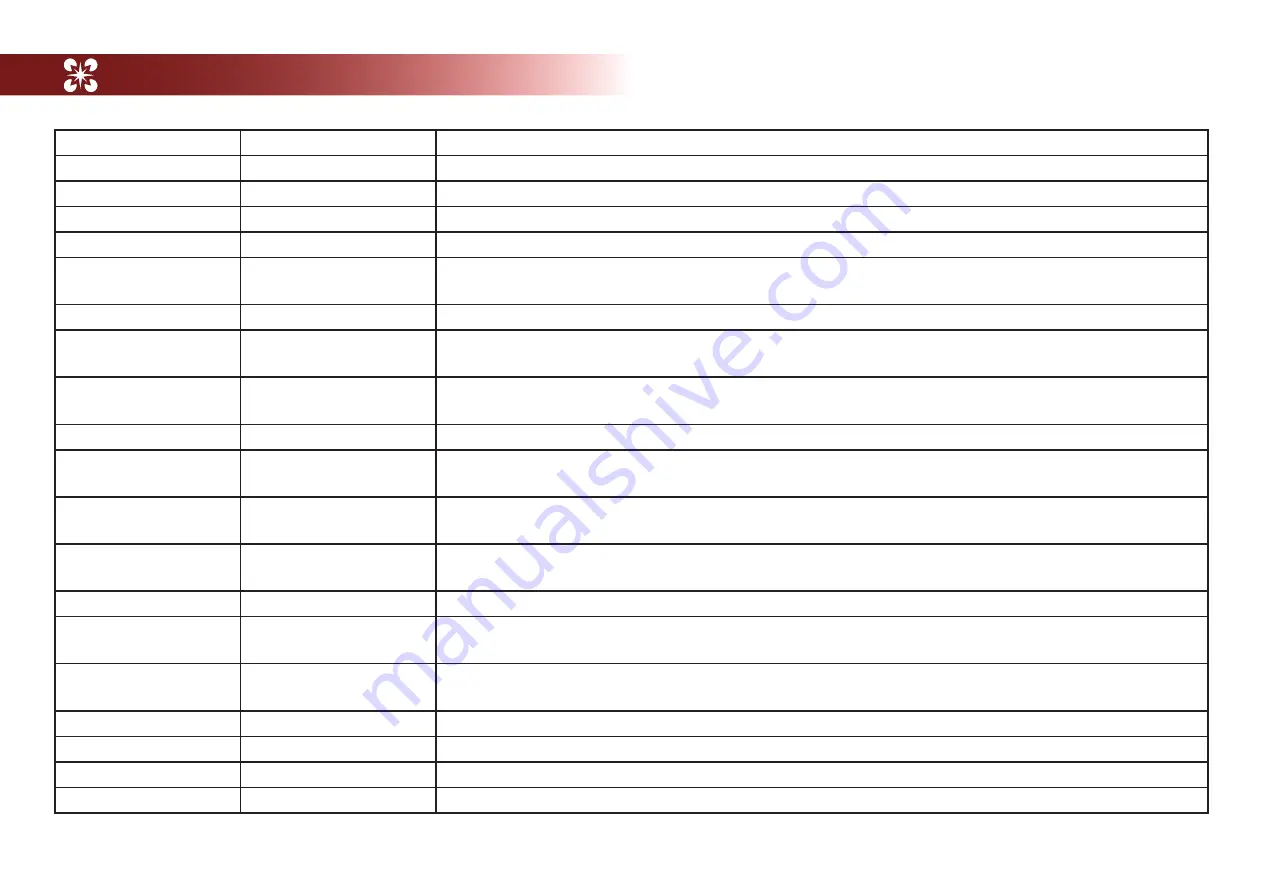
MIN_PERIOD
50
The minimum commutation period allowed in microseconds
MAX_PERIOD
12000
The maximum commutation period allowed in microseconds
BLANKING_MICROS
30
The number of microseconds to ignore back EMF after a commutation.
ADVANCE
15
The amount of timing advance in electrical degrees. There are 60 electrical degrees in a commutation
cycle. This value can be set from 0 to 30 degrees.
START_VOLTAGE
1.1
The amount of voltage presented to the motor during startup. Allowable range is 0.1v to 3.0v
GOOD_DETECTS_START
75
Once started, the number of good, in order zero crossings needed to be detected before the motor is
considered to be in the running state.
BAD_DETECTS_DISARM
48
The number of missed zero crossing detects allowed before the ESC considers the motor not to be run
-
ning at which point will go into the disarmed state.
MAX_CURRENT
20
The maximum amount of current in amps that the ESC will allow. Current is dynamically regulated. Al
-
ways set this value low and only increase it if you know what you are doing.
SWITCH_FREQ
20
The output PWM pulse frequency used to power the motor windings in KHz. Valid range is from 4KHz
to 64KHz.
MOTOR_POLS
14
The number of magnetic poles used in the motor's construction. This value only needs to be set cor
-
rectly if you want to use the RPM closed loop mode.
PWM_MIN_PERIOD
2200
The minimum period in microseconds that the ESC will consider an input PWM waveform to be valid.
Default value represents approx 450Hz
PWM_MAX_PERIOD
25000
The maximum period in microseconds that the ESC will consider an input PWM waveform to be valid.
Default value represents approx 40Hz
PWM_MIN_VALUE
750
The minimum input PWM pulse length in microseconds which the ESC will consider to be valid.
PWM_LO_VALUE
1000
The input PWM pulse length in microseconds for the lowest throttle setting.
PWM_HI_VALUE
1950
The input PWM pulse length in microseconds for the highest throttle setting.





















































