





























Autopilot Installation Manual
6.1
Elevator
6.1.1
Pitch tuning
When reaching target altitude and cruising speed make sure the aircraft is
trimmed properly for a level flight. The operator shall enter the Tune dialog
for pitch loop as shown in figure 12. By default the autopilot servo motor
is in disengaged state. The autopilot engages every time the operator selects
new
Reference
value and disengages every time the operator changes any of
the P-, I- or D- term.
We provided a real tuning procedure example on figure 17. We choose 0.45
for initial
P-term
. Then we gradually increased the
P-term
by 0.2 until we
reach satisfactory response. There should be small overshoot present and the
servo motor should quickly react to the pitch reference change. Before every
step change set reference to 0
◦
and wait for the aircraft to stabilize. Follow
provided flow charts for tuning each controller term.
P-term
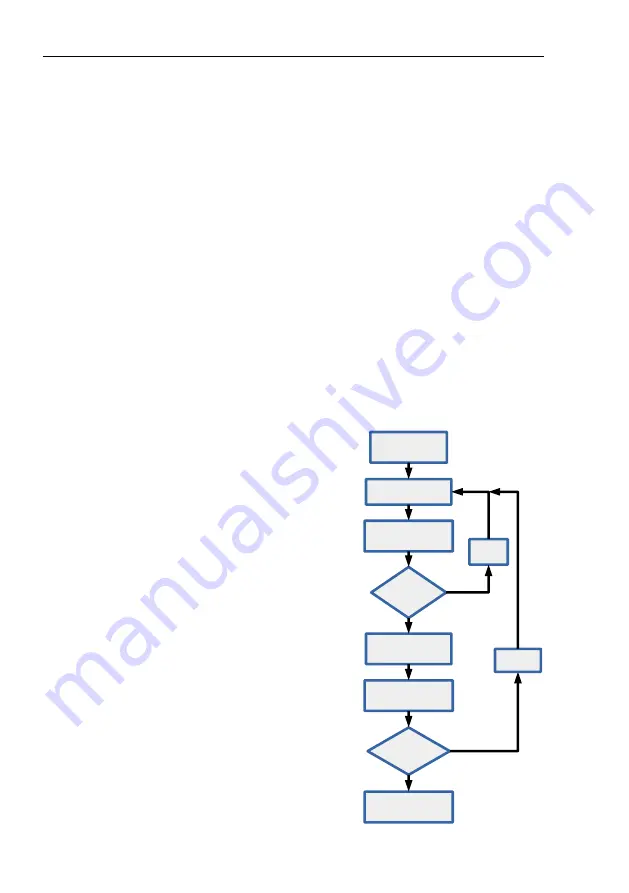
shall be tuned following flow chart shown in figure 6.1.1. Start
with low
P-term
and then gradually increasing it, until you reach satisfactory
response.
1. Set 0 degrees reference angle.
2. Steady state - Wait enough time for con-
troller to stabilize. Around 10 seconds
usually is enough.
3. Step change - Change reference angle by
3-5 degrees. This depends on aircraft. In
our example we choose 4 degrees.
4. Observe - Wait 10-15 seconds.
5. P-term - Depending on the aircraft re-
sponse we have to modify the
P-term
.
Please see example tuning on figure 17
for example responses and appropriate
actions.
6. Repeat - Go back to step 1.
Wait 10 seconds
Is pitch
oscillating?
Set Reference to 0°
Cruise speed,
altitude, trimmed
P=P/2
Wait 10 seconds
Is response
OK?
Step change
Reference = +3-5°
Tune I-term
P=P+0.2
no
yes
no
yes
32
©
Kanardia
2016-2020
Содержание Kanardia
Страница 1: ...Autopilot Installation Manual Kanardia d o o November 2020 Revision 2 1 ...
Страница 2: ......





















































