




























Failure source:
Reason for initiation of the failure behaviour
(Parameter "
FAILURE SOURCE
", page 32)
.
Loss of setpoint E1
.
Loss of setpoint E1 or feedback E2.
Failure position:
The following actions (reactions of the actuator) can be programmed for loss
of signal: (parameter "
FAILURE POSITION
", page 32)
-
FAIL AS IS
:
the actuator stops in the current position
-
FAIL CLOSE
:
the actuator runs to end position CLOSED
-
FAIL OPEN
:
the actuator runs to end position OPEN
-
FAIL TO PRESET
:
the actuator runs to the predetermined position
Preset position:
If the safety action "
FAIL TO PRESET
" (Parameter "
FAILURE
POSITION
", page 32) is set, the actuator runs to the safety position stated
here.
Delay time:
Determines the time passing between the recognition of a cable break and
the initiation of the safety action. (Parameter "
DELAY TIME
", page 32)
16.6 Signal relays
The signal relays of the AUMATIC are programmable and can be assigned
to different signals. The possible contents of the collective fault signal (fault
relay) as well as the different signals of the signal relays 1 to 5 are
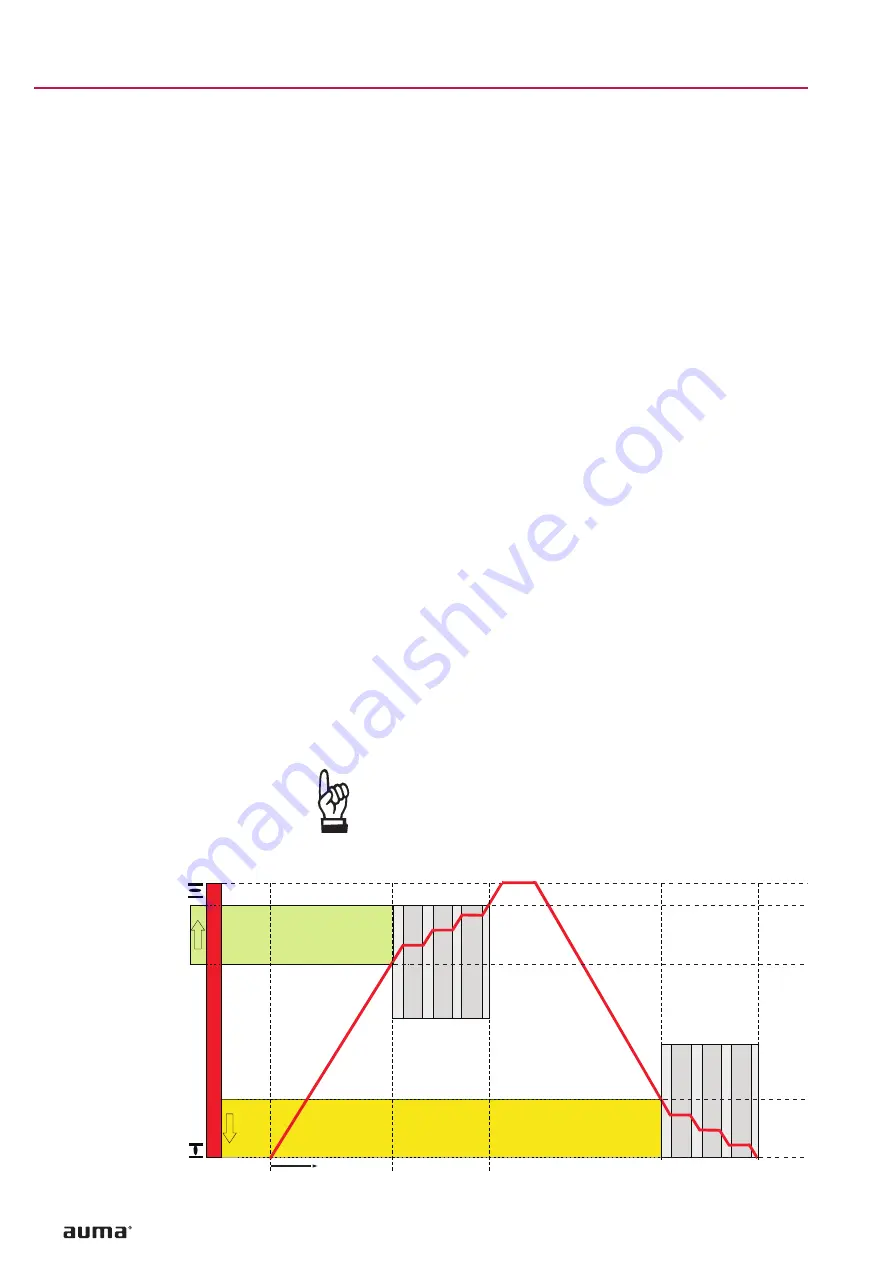
16.7 Stepping mode
With stepping mode the operating time can be increased for the entire or
any portion of the valve travel (see figure P8).
.
Stepping mode is possible via the operation modes LOCAL, REMOTE
and SETPOINT.
.
Stepping mode can be activated independently for each direction OPEN
and CLOSE (parameter "
DIRECTION OPEN
" and "
DIRECTION
CLOSE
", page 33).
.
For both directions the stepping range (start and end of stepping mode)
can be set separately (parameters "
START STEP
" and "
STOP STEP
",
page 33).
.
The ON and OFF times can be set independently for the directions OPEN
and CLOSE (parameter "
ON TIME OPEN
"/"
OFF TIME OPEN
" and "
ON
TIME CLOSE
"/"
OFF TIME CLOSE
", page 33).
To be able to make the settings for stepping mode via the
display, the setting "
STEPPING MODE
" (page 44, menu M40)
must be in position "
VIEW ENABLED
".
54
Part-turn actuators SG 03.3 – SG 04.3
with AUMATIC AC 01.1
Operation instructions
End position
OPEN
Stepping range
OPEN
Stepping range
CLOSE
End position
CLOSED
P
aus
e
tim
e
Start of stepping mode OPEN
t
Start of stepping mode CLOSE
End of stepping
mode OPEN
End of stepping
mode CLOSE
Ru
nnin
g
tim
e
P
aus
e
tim
e
Ru
nnin
g
tim
e
Fig. P8







































































