




























187
2467S–AVR–07/09
ATmega128
The recommendations of the maximum receiver baud rate error was made under the assump-
tion that the receiver and transmitter equally divides the maximum total error.
There are two possible sources for the receivers baud rate error. The receiver’s system clock
(XTAL) will always have some minor instability over the supply voltage range and the tempera-
ture range. When using a crystal to generate the system clock, this is rarely a problem, but for a
resonator the system clock may differ more than 2% depending of the resonators tolerance. The
second source for the error is more controllable. The baud rate generator can not always do an
exact division of the system frequency to get the baud rate wanted. In this case an UBRR value
that gives an acceptable low error can be used if possible.
Multi-processor
Communication
Mode
Setting the Multi-processor Communication mode (MPCM) bit in UCSRA enables a filtering
function of incoming frames received by the USART receiver. Frames that do not contain
address information will be ignored and not put into the receive buffer. This effectively reduces
the number of incoming frames that has to be handled by the CPU, in a system with multiple
MCUs that communicate via the same serial bus. The transmitter is unaffected by the MPCM
setting, but has to be used differently when it is a part of a system utilizing the Multi-processor
Communication mode.
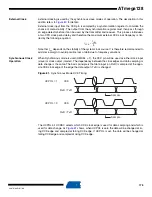
If the receiver is set up to receive frames that contain 5 to 8 data bits, then the first stop bit indi-
cates if the frame contains data or address information. If the receiver is set up for frames with 9
data bits, then the ninth bit (RXB8) is used for identifying address and data frames. When the
frame type bit (the first stop or the 9th bit) is one, the frame contains an address. When the
frame type bit is zero the frame is a data frame.
Table 75.
Recommended Maximum Receiver Baud Rate Error for Normal Speed Mode (U2X =
0)
D
# (Data+Parity Bit)
R
slow
%
R
fast
%
Max Total
Error %
Recommended Max
Receiver Error %
5
93,20
106,67
+6.67/-6.8
± 3.0
6
94,12
105,79
+5.79/-5.88
± 2.5
7
94,81
105,11
+5.11/-5.19
± 2.0
8
95,36
104,58
+4.58/-4.54
± 2.0
9
95,81
104,14
+4.14/-4.19
± 1.5
10
96,17
103,78 %
+3.78/-3.83
± 1.5
Table 76.
Recommended Maximum Receiver Baud Rate Error for Double Speed Mode (U2X =
1)
D
# (Data+Parity Bit)
R
slow
%
R
fast
%
Max Total
Error %
Recommended Max
Receiver Error %
5
94,12
105,66
+5.66/-5.88
± 2.5
6
94,92
104,92
+4.92/-5.08
± 2.0
7
95,52
104,35
+4.35/-4.48
± 1.5
8
96,00
103,90
+3.90/-4.00
± 1.5
9
96,39
103,53
+3.53/-3.61
± 1.5
10
96,70
103,23
+3.23/-3.30
± 1.0
Содержание ATmega128
Страница 384: ...vi 2467S AVR 07 09 ATmega128 Rev 2467C 02 02 377 Table of Contents i...
Страница 385: ...vii 2467S AVR 07 09 ATmega128...







































































