




























Signal Descriptions
ARM DDI 0186A
Copyright © 2000 ARM Limited. All rights reserved.
A-15
A.9
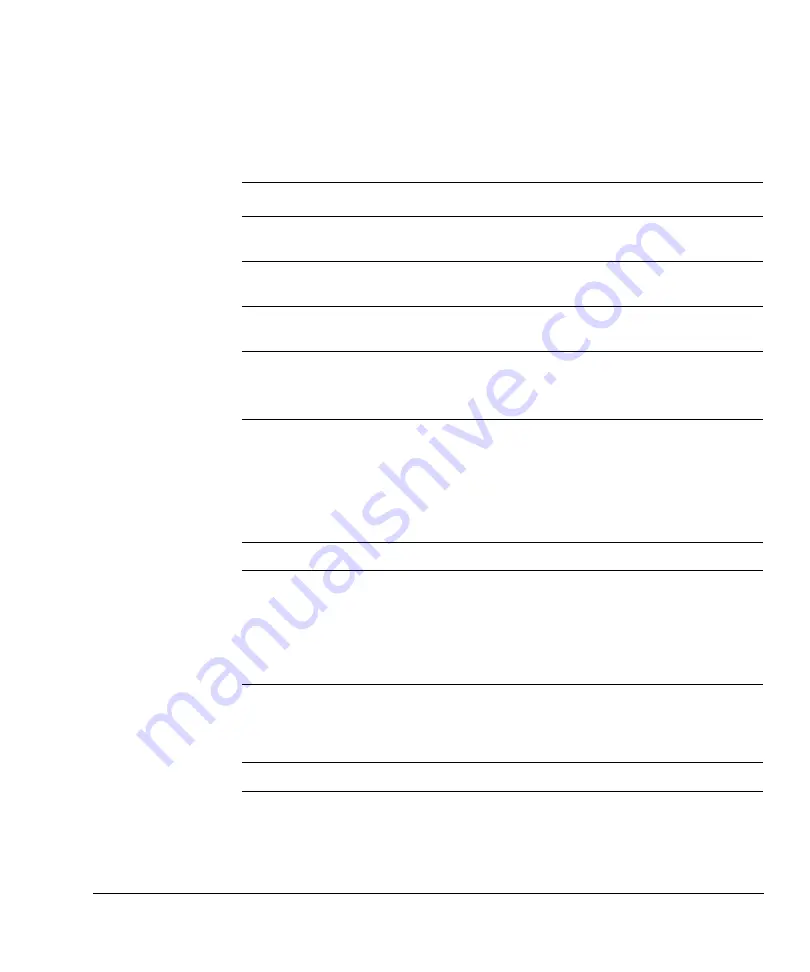
DMA Signals
DMA signals are listed in Table A-8.
Table A-8 DMA signals
Name
Direction
Description
DMAENABLE
Input
Enable ARM966E-S DMA port. Must be tied LOW
if DMA not required.
DMAnREQ
Input
DMA not memory request. Must be tied HIGH if
DMA not required.
DMAA[25:0]
Input
DMA address. Accesses up to 64Mbyte of memory.
Unused address bits must be tied LOW.
DMAnRW
Input
DMA write not read:
0 = read
1 = write.
DMAMAS[1:0]
Input
DMA Memory Access Size. Encodes the size of
writes. Reads are always word wide:
00 = byte
01 = halfword
10 = word
11 = reserved.
DMAD[31:0]
Input
DMA write data.
DMAWait
Input
DMA Wait. Used to stall the ARM966E-S to allow a
DMA access to take place. This functionality is only
required if the data RAM is single-port. This signal
must be tied LOW if the data RAM is dual-port.
This signal has the same functionality internal to the
ARM966E-S as
FIFOFULL
.
DMAReady
Output
DMA Ready. Asserted HIGH when the ARM966E-S
is stalled. Only needs to be sampled when the data
RAM is single port, for example when the
ARM966E-S stall was requested by
DMAWait
.
DMARData[31:0]
Output
DMA read data.
Содержание ARM966E-S
Страница 6: ...Contents vi Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 20: ...Introduction 1 4 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 48: ...Tightly coupled SRAM 4 12 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 80: ...Bus Interface Unit 6 20 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 118: ...Debug Support 8 26 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 130: ...Test Support 10 8 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 142: ...Instruction cycle timings 11 12 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 158: ...Signal Descriptions A 16 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Страница 176: ...AC Parameters B 18 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...







































































