





























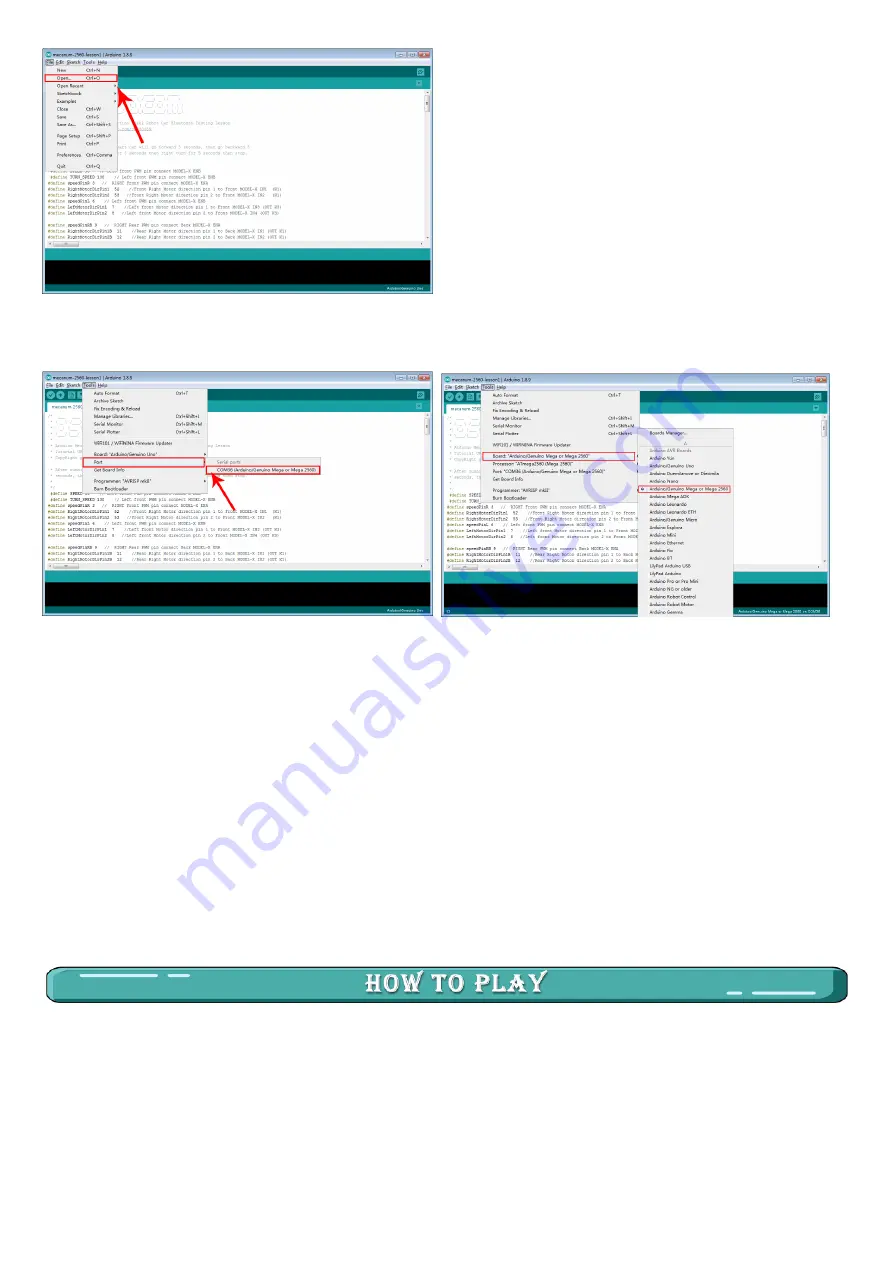
Step 4: Choose corresponding board/port for your project, upload the sketch to the board.
Step 5:Ultrasonic sensor servo initial direction alignment
After turning on the battery, the servo will make some movement and finally stops at a
direction for 5 seconds. During this first 5 seconds, you must make sure the Ultrasonic
sensor(two eyes) is facing straight forward.
If it is not straight forward, you should turn off battery immediately and remove the
sensor from servo, reinstall it and make it facing straight forward direction as
following picture.
Otherwise the obstacle avoidance program will not work properly. After adjusting sensor
direction, turn on battery again. If its direction is not straight forward, turn off
battery and do direction alignment again.
If the ultrasonic module turn to front view position, that means you no need adjust
sensor position anymore. Just wait 5 seconds. If no obstacle is detected, the car will go
forward. If any obstacles is detected, the car will stop, the ultrasonic module will turn
from right to left to detect surrounding obstacle.
The robot car will decide to make left turn, right turn or backward according to obstacle
sensor data and our obstacle avoidance algorithm. Sometimes your car might have collision
Содержание Mega2560
Страница 1: ...Mars Explorer Mecanum Wheel Robotic Kit Arduino Mega2560 More information http osoyoo com p 30176 ...
Страница 7: ...Picture 6 Type A and Type B motors location map in chassis Picture 7 Wheel installation map ...
Страница 10: ...Picture 12 Wifi shield installation guide ...
Страница 13: ...Picture 17 Connect Rear model X control pins to Mega2560 Picture 18 Connect Model X to Voltage meter ...
Страница 14: ...Open source Arduino Software IDE Download Arduino IDE here https www arduino cc en Main Software setlang en ...
Страница 28: ...STEP2 Bluetooth Module should be inserted into bluetooth 6 pin slot in OSOYOO Wifi Board ...