





























Instruction manual 91/104 V9.2
Commissioning
NOTE:
random change in these parameters can lead to a worsening of the drive’s performance. It is advisable not to change these
values unless strictly necessary and possibly to contact the ALTER technical office for explanations and clarifications. Please note
that it is possible to return the parameters to the value prior to the change simply by removing the voltage from the services and
then returning it or using the ”Restore“ menu (see page 40), always allowed to NOT have already saved the parameters with the
”Memo Parameters“ menu (see page 40).
Proport. Gain
Minimum Maximum Units of measure
0
99.00
-
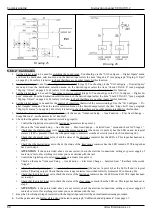
This parameter modifies the Proportional time constant of the current loop (see drawing 21). The modification of this parameter is
useful in case of stop of the drive due to the “Overcurrent” alarm; in this case it means that the adjustment is too fast (or too slow) and
the current is not properly controlled by the above alarm. To enter the right parameter it is essential to use the PC connected to the
serial port of the drive and use the software to display the signals of the current loop while the motor is working and decide what to
do.
It is recommended to change this parameter in small steps and test the motor reaction before further changes. When you have found
the right parameter that meets your needs, you can memorise the variations with the ”Memo Parameters“ menu (see page 40) and not
before; in this way it will always be possible to return to the previous situation.
Integr. Gain
Minimum Maximum Units of measure
0
99.00
-
This parameter modifies the Integrative time constant of the current loop (see drawing 21). The modification of this parameter is
useful in case of stop of the drive due to the “Overcurrent” alarm; in this case it means that the adjustment is too fast (or too slow) and
the current is not properly controlled by the above alarm. To enter the right parameter it is essential to use the PC connected to the
serial port of the drive and use the software to display the signals of the current loop while the motor is working and decide what to
do.
It is recommended to change this parameter in small steps and test the motor reaction before further changes. When you have found
the right parameter that meets your needs, you can memorise the variations with the ”Memo Parameters“ menu (see page 40) and not
before; in this way it will always be possible to return to the previous situation.
Pi Flux Loop
Set of parameters to adjust the time constants of the control loop PI of the motor flow.
Alter Elettronica s.r.l.
55
Drawing 21 Current loop
IsDem
D/Q
Is Fbk
D/Q
-
P
P gain
I
I gain
Anti
Windup
+
Limit
Vs D/Q







































































