


















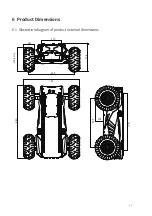

10
The chassis status information will be feedback, and what’s more, the information about motor current, encoder and temperature are also
included. The following feedback frame contains the information about motor current, encoder and motor temperature.
The motor numbers of the four motors in the chassis correspond to: steering No. 1, right rear wheel No. 2, and left rear wheel No. 3
Sending node
Steer-by-wire chassis
Date length
Position
byte [0]
byte [1]
byte [2]
byte [3]
byte [4]
byte [5]
byte [6]
byte [7]
Receiving node
Decision-making control unit
0×08
Function
Drive voltage higher 8 bits
Drive voltage lower 8 bits
Drive temperature higher 8 bits
Drive temperature lower 8 bits
Motor temperature
Drive status
Reserved
Reserved
ID
0x261~0x263
Data type
unsigned int16
signed int16
signed int8
unsigned int8
—
—
Unit 1°C
See the details in [Drive control status]
0x00
0x00
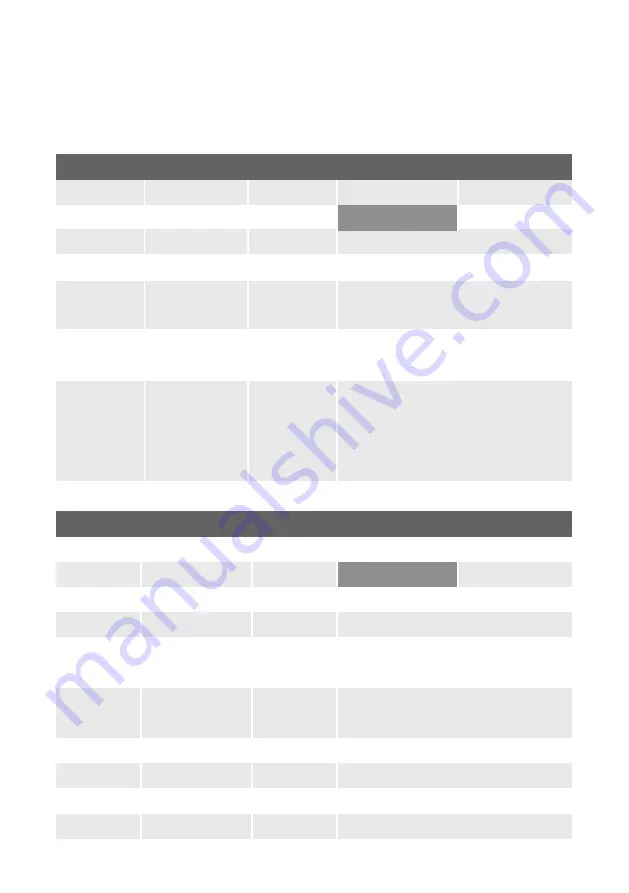
Motor Drive Low Speed Information Feedback Frame
Command Name
Description
Current voltage of drive unit 0.1V
Unit 1°C
Receive-timeout (ms)
None
Cycle (ms)
100ms
Sending node
Steer-by-wire chassis
Date length
Position
byte [0]
byte [1]
byte [2]
byte [3]
byte [4]
byte [5]
byte [6]
byte [7]
Receiving node
Chassis node
0×08
Function
Motor speed higher 8 bits
Motor speed lower 8 bits
Motor current higher 8 bits
Motor current lower 8 bits
Position highest bits
Position second-highest bits
Position second-lowest bits
Position lowest bits
ID
0x251~0x253
Data type
signed int16
signed int16
signed int32
Motor Drive High Speed Information Feedback Frame
Command Name
Description
Current speed of the motor Unit RPM
Motor current Unit 0.1A
Current position of the motor Unit: pulse
Receive-timeout (ms)
None
Cycle (ms)
20ms
Motor speed current position information feedback




































































