





























Using Digital I/O on Robot XIO Connector
Adept Cobra s800 Inverted Robot User’s Guide, Rev C
63
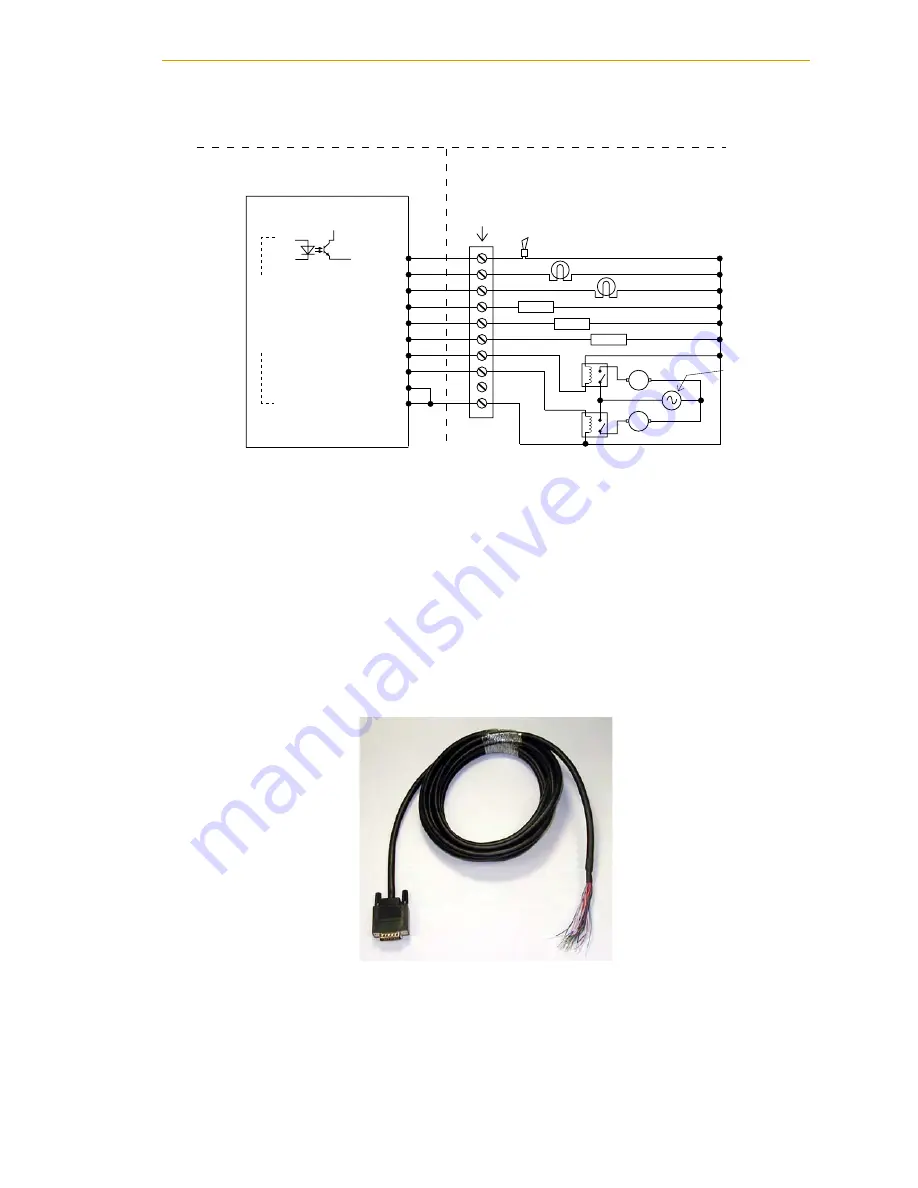
Typical Output Wiring Example
Figure 5-5. Typical User Wiring for XIO Output Signals
XIO Breakout Cable
The XIO Breakout cable is available as an option - see
. This cable connects to
the XIO connector on the robot, and provides flying leads on the user’s end for connecting
input and output signals in the workcell. The part number for the cable is 04465-000, and
the length is 5 M (16.4 ft).
See
for the wire chart on the cable.
NOTE:
This cable is not compatible with the XIO Termination Block.
Figure 5-6. Optional XIO Breakout Cable
M
Adept-
Su
pplied E
qu
ipment
U
s
er-
Su
pplied E
qu
ipment
O
u
tp
u
t
s
1-
8
Typic
a
l U
s
er Lo
a
d
s
XIO Connector – 26-Pin F
em
a
le D-
Sub
+24 VDC
1
9
S
ign
a
l 00
9
7
20
S
ign
a
l 00
98
21
S
ign
a
l 00
99
22
S
ign
a
l 0100
2
3
S
ign
a
l 0101
24
S
ign
a
l 0102
25
S
ign
a
l 010
3
26
S
ign
a
l 0104
GND
GND
Lo
a
d
1
C
us
tomer
AC Power
Su
pply
10
M
Lo
a
d
Lo
a
d
L
N
(e
qu
iv
a
lent
circ
u
it)
Wiring
Termin
a
l
Block
Содержание Cobra s800
Страница 1: ...Adept Cobra s800 Inverted Robot User s Guide...
Страница 2: ......
Страница 14: ......
Страница 42: ......
Страница 68: ......
Страница 94: ......
Страница 112: ......
Страница 136: ......
Страница 150: ......
Страница 155: ......
Страница 156: ...3011 Triad Drive Livermore CA 94551 925 245 3400 P N 06937 000 Rev C...