





























2.2.3 Risk of tipping/stability
Risk of tipping
If the robot is not fastened to the foundation while moving the arm, the robot is not
stable in the whole working area. Moving the arm will displace the center of gravity,
which may cause the robot to tip over.
The shipping position is the most stable position.
Do not
change the robot position before securing it to the foundation!
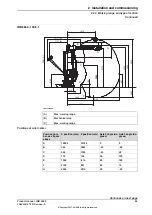
Shipping and transportation position
This figure shows the robot in its shipping position and transportation position.
28°
42°
xx0700000001
IRB 6660 - 130/3.1, IRB 6660 - 100/3.3
A
IRB 6660 - 205/1.9
B
Continues on next page
58
Product manual - IRB 6660
3HAC028197-001 Revision: S
© Copyright 2007-2018 ABB. All rights reserved.
2 Installation and commissioning
2.2.3 Risk of tipping/stability
Содержание IRB 6660
Страница 1: ...ROBOTICS Product manual IRB 6660 ...
Страница 2: ...Trace back information Workspace R18 2 version a18 Checked in 2018 11 20 Skribenta version 5 3 012 ...
Страница 8: ...This page is intentionally left blank ...
Страница 18: ...This page is intentionally left blank ...
Страница 48: ...This page is intentionally left blank ...
Страница 108: ...This page is intentionally left blank ...
Страница 172: ...This page is intentionally left blank ...
Страница 366: ...This page is intentionally left blank ...
Страница 386: ...This page is intentionally left blank ...
Страница 388: ...This page is intentionally left blank ...
Страница 394: ......
Страница 395: ......




































































