





























4 Repair
4.5.4. Replacement of balancing device
3HAC023082-001 Revision: E
322
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
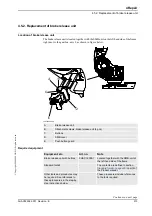
4.5.4. Replacement of balancing device
Location of balancing device
The balancing device is located on rear top of the frame as shown in the figure below.
xx0200000223
A
Balancing device
B
Rear cover
C
Support shaft inside
D
Attachment screws, rear cover
E
Balancing device shaft, including securing screw
F
Bearing attachment
G
Parallel pin (inside bearing attachment)
H
Attachment screws, bearing attachments
Continues on next page
Содержание IRB 6600 - 175/2.8 type B
Страница 2: ......
Страница 10: ...Table of Contents 8 3HAC023082 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Страница 18: ...How to read the product manual 3HAC023082 001 Revision E 16 Copyright 2004 2008 ABB All rights reserved ...
Страница 512: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Contents 101 ...
Страница 514: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Legend 103 ...
Страница 515: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Brake Release Unit 104 ...
Страница 517: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Axis 1 106 ...
Страница 518: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Axis 2 107 ...
Страница 519: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Axis 3 108 ...
Страница 520: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Axis 4 109 ...
Страница 521: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Axis 5 IRB 7600 110 ...
Страница 522: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Axis 6 111 ...
Страница 523: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Switches axis 1 113 ...
Страница 524: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Switches Fan axis 2 114 ...
Страница 525: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Switches Fan axis 3 115 ...
Страница 526: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Axis 5 IRB 6600 901 ...
Страница 527: ... Copyright 2004 2006 ABB All rights reserved Revision 02 sheet Circuit Diagram 3HAC 13347 1 Design changes note 1 1 905 ...
Страница 532: ......







































































