





























ii
Valid for CRB 15000-10/1.52.
iii
Valid for CRB 15000-12/1.27.
Wall mounted
Max. load (emergency stop)
Endurance load (in operation)
Force
+280 ±1000 N
+280 ±130 N
Force xy
±944 N
±289 N
Force z
±768 Nm
±275 Nm
Torque xy
±338 Nm
±162 Nm
Torque z
Suspended
Max. load (emergency stop)
Endurance load (in operation)
Force
±1113 N
/ ±1460 N
/ ±1450 N
±303 N
i
/ ±470 N
ii
/ ±470 N
iii
Force xy
-280 ±857 N
/ +500 ±650 N
/ +480
±690 N
-280 ±147 N
/ +500 ±410 N
/ +480
±420 N
Force z
±711 Nm
/ ±1,280 Nm
/ ±1,180 Nm
±246 Nm
/ ±570 Nm
/ ±580 Nm
Torque xy
±334 Nm
/ ±720 Nm
/ ±690 Nm
±145 Nm
/ ±200 Nm
/ ±210 Nm
Torque z
i
Valid for CRB 15000-5/0.95.
ii
Valid for CRB 15000-10/1.52.
iii
Valid for CRB 15000-12/1.27.
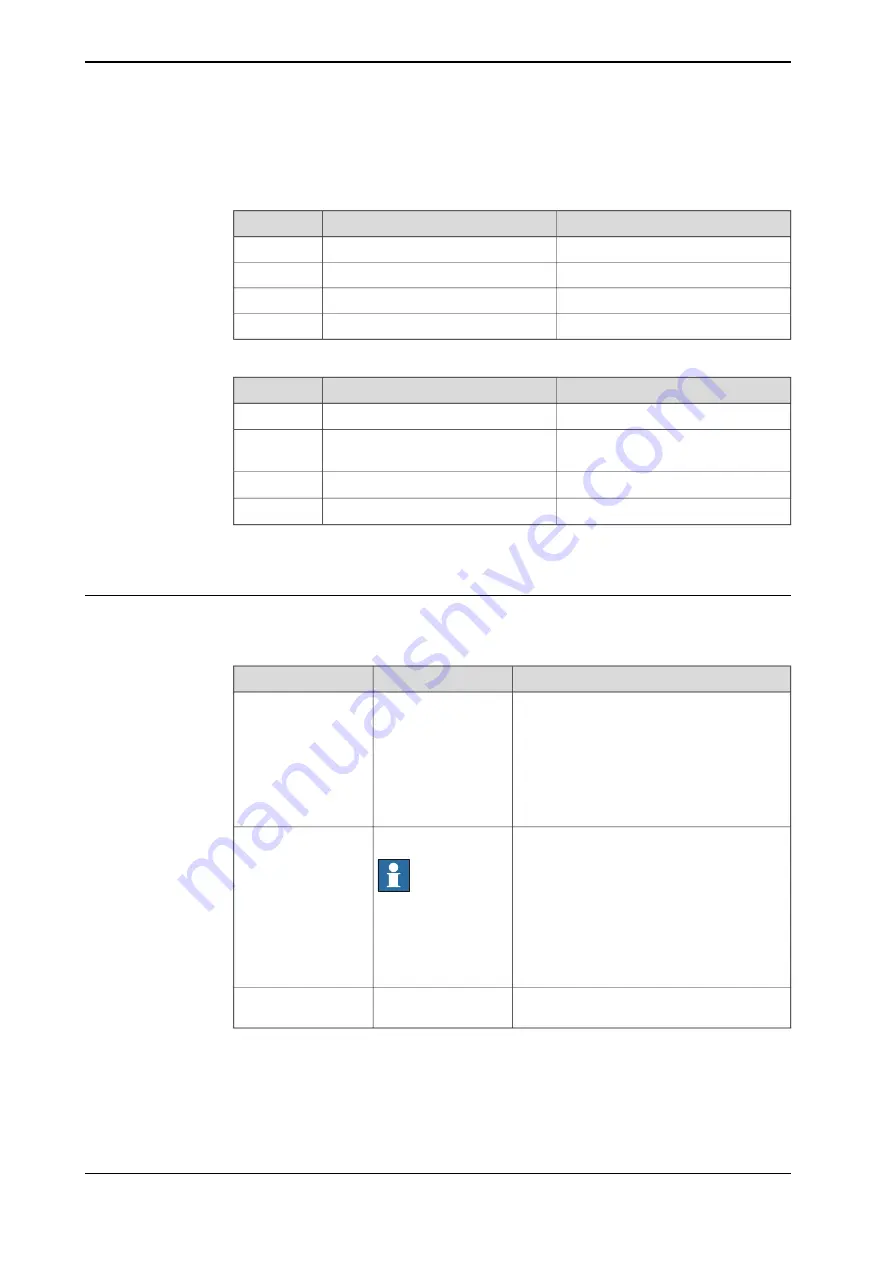
Requirements, foundation
The table shows the requirements for the foundation where the weight of the
installed robot is included:
Note
Value
Requirement
The value for levelness aims at the circum-
stance of the anchoring points in the robot
base.
0.1/500 mm
Flatness of foundation
surface
In order to compensate for an uneven sur-
face, the robot can be recalibrated during in-
stallation. If resolver/encoder calibration is
changed this will influence the absolute ac-
curacy.
The value is recommended for optimal per-
formance.
22Hz
Note
It may affect the ma-
nipulator lifetime to
have a lower reson-
ance frequency than
recommended.
Minimum resonance
frequency
Due to foundation stiffness, consider robot
mass including equipment.
i
For information about compensating for
foundation flexibility, see the description of
Motion Process Mode
in the manual that de-
scribes the controller software option, see
150 Mpa
Minimum foundation
material yield strength
i
The minimum resonance frequency given should be interpreted as the frequency of the robot
mass/inertia, robot assumed stiff, when a foundation translational/torsional elasticity is added, i.e.,
the stiffness of the pedestal where the robot is mounted. The minimum resonance frequency should
not be interpreted as the resonance frequency of the building, floor etc. For example, if the equivalent
mass of the floor is very high, it will not affect robot movement, even if the frequency is well below
the stated frequency. The robot should be mounted as rigid as possibly to the floor.
Disturbances from other machinery will affect the robot and the tool accuracy. The robot has
resonance frequencies in the region 10 – 20 Hz and disturbances in this region will be amplified,
Continues on next page
42
Product manual - CRB 15000
3HAC077389-001 Revision: L
© Copyright 2021 - 2023 ABB. All rights reserved.
2 Manipulator description
2.2 Technical data
Continued
Содержание CRB 15000
Страница 1: ...ROBOTICS Product manual CRB 15000 ...
Страница 2: ...Trace back information Workspace 23B version a17 Checked in 2023 06 29 Skribenta version 5 5 019 ...
Страница 8: ...This page is intentionally left blank ...
Страница 16: ...This page is intentionally left blank ...
Страница 38: ...This page is intentionally left blank ...
Страница 54: ...This page is intentionally left blank ...
Страница 182: ...This page is intentionally left blank ...
Страница 200: ...This page is intentionally left blank ...
Страница 1058: ...This page is intentionally left blank ...
Страница 1076: ...This page is intentionally left blank ...
Страница 1095: ......