
















34
PME120-AI / PME120-AN (Contrac)
ELECTRICAL ROTARY ACTUATOR | SEI/PME120-EN REV. A
… 10 Troubleshooting
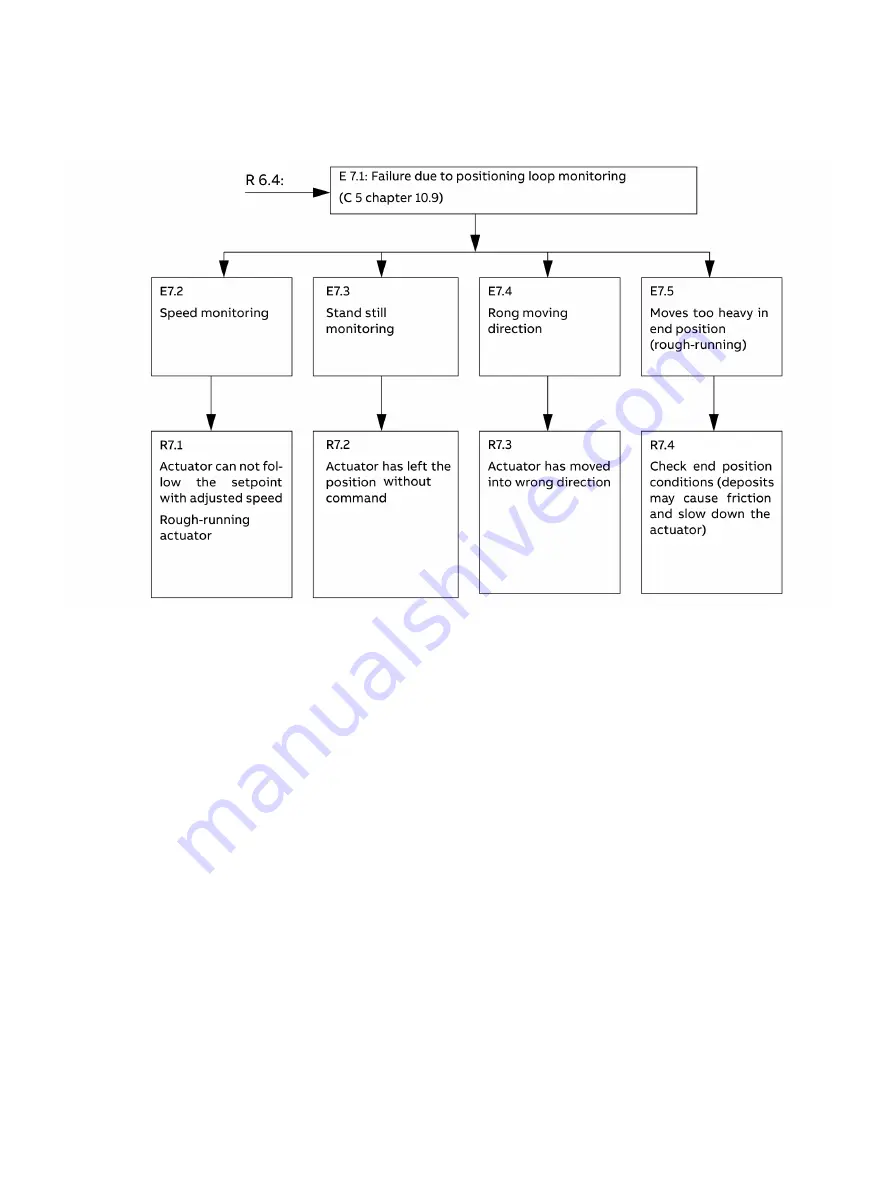
Failure due to response of positioning loop monitoring
Figure 44: Failure due to response of positioning loop monitoring
General
Actuator runs with creeping speed in one or both end positions
– Check the software settings for leaving the end position; if ‘break-away’ is activated, the actuator moves with increased torque /
force but with reduced speed.
Imprecise behavior in step-control mode
– Use graphical user interface to check function assignment of digital input settings; select ‘step controller’.
Actuator over-runs end position(s)
– Change the software settings for the end position behavior to ‘Position-dependent switch-off’ and enter the associated switch-
off position.
– Adjust the mechanical limit stops in order to avoid an end position over-run.
Actuator moves into an end position once it reaches a setpoint
– De-activate ‘close tight’ in the software settings for modulating control near the end position.
Actuator position does not correspond to setpoint although the position signal corresponds to the setpoint
– De-activate the programmable setpoint in the software settings for the setpoint characteristic.
Actuator follows the setpoint only within a limited range
– De-activate ‘split range’ in the software settings for the setpoint characteristic.





















































